編輯:關於android開發
安卓驅動陀螺儀代碼:
來源http://www.cnblogs.com/xiaobo-Linux/ qq463431476
package zcd.functions;
import zcd.netanything.R;
import android.app.Fragment;
import android.content.Context;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.util.Log;
import android.view.LayoutInflater;
import android.view.View;
import android.view.ViewGroup;
import android.widget.TextView;
public class VR extends Fragment implements SensorEventListener {
private SensorManager sensorManager;
private Sensor magneticSensor;
private TextView showTextView;
private Sensor accelerometerSensor;
private Sensor gyroscopeSensor;
// 將納秒轉化為秒
private static final float NS2S = 1.0f / 1000000000.0f;
private float timestamp;
private float angle[] = new float[3];
public View onCreateView(LayoutInflater inflater, ViewGroup container,
Bundle savedInstanceState) {
// TODO Auto-generated method stub
View view = inflater.inflate(R.layout.vr,container, false);
showTextView = (TextView)view.findViewById(R.id.text);
return view;
}
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
sensorManager = (SensorManager) getActivity().getSystemService(Context.SENSOR_SERVICE);
magneticSensor = sensorManager
.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
accelerometerSensor = sensorManager
.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
gyroscopeSensor = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE);
//注冊陀螺儀傳感器,並設定傳感器向應用中輸出的時間間隔類型是SensorManager.SENSOR_DELAY_GAME(20000微秒)
//SensorManager.SENSOR_DELAY_FASTEST(0微秒):最快。最低延遲,一般不是特別敏感的處理不推薦使用,該模式可能在成手機電力大量消耗,由於傳遞的為原始數據,訴法不處理好會影響游戲邏輯和UI的性能
//SensorManager.SENSOR_DELAY_GAME(20000微秒):游戲。游戲延遲,一般絕大多數的實時性較高的游戲都是用該級別
//SensorManager.SENSOR_DELAY_NORMAL(200000微秒):普通。標准延時,對於一般的益智類或EASY級別的游戲可以使用,但過低的采樣率可能對一些賽車類游戲有跳幀現象
//SensorManager.SENSOR_DELAY_UI(60000微秒):用戶界面。一般對於屏幕方向自動旋轉使用,相對節省電能和邏輯處理,一般游戲開發中不使用
sensorManager.registerListener(this, gyroscopeSensor,
SensorManager.SENSOR_DELAY_GAME);
sensorManager.registerListener(this, magneticSensor,
SensorManager.SENSOR_DELAY_GAME);
sensorManager.registerListener(this, accelerometerSensor,
SensorManager.SENSOR_DELAY_GAME);
}
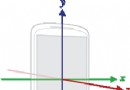
//坐標軸都是手機從左側到右側的水平方向為x軸正向,從手機下部到上部為y軸正向,垂直於手機屏幕向上為z軸正向
@Override
public void onSensorChanged(SensorEvent event) {
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) {
// x,y,z分別存儲坐標軸x,y,z上的加速度
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
// 根據三個方向上的加速度值得到總的加速度值a
float a = (float) Math.sqrt(x * x + y * y + z * z);
System.out.println("a---------->" + a);
// 傳感器從外界采集數據的時間間隔為10000微秒
System.out.println("magneticSensor.getMinDelay()-------->"
+ magneticSensor.getMinDelay());
// 加速度傳感器的最大量程
System.out.println("event.sensor.getMaximumRange()-------->"
+ event.sensor.getMaximumRange());
showTextView.setText("x-->" + x + "\ny-->" +y + "\nz-->" + z);
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) {
// 三個坐標軸方向上的電磁強度,單位是微特拉斯(micro-Tesla),用uT表示,也可以是高斯(Gauss),1Tesla=10000Gauss
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
// 手機的磁場感應器從外部采集數據的時間間隔是10000微秒
System.out.println("magneticSensor.getMinDelay()-------->"
+ magneticSensor.getMinDelay());
// 磁場感應器的最大量程
System.out.println("event.sensor.getMaximumRange()----------->"
+ event.sensor.getMaximumRange());
System.out.println("x------------->" + x);
System.out.println("y------------->" + y);
System.out.println("z------------->" + z);
//
// Log.d("TAG","x------------->" + x);
// Log.d("TAG", "y------------>" + y);
// Log.d("TAG", "z----------->" + z);
//
// showTextView.setText("x---------->" + x + "\ny-------------->" +
// y + "\nz----------->" + z);
} else if (event.sensor.getType() == Sensor.TYPE_GYROSCOPE) {
//從 x、y、z 軸的正向位置觀看處於原始方位的設備,如果設備逆時針旋轉,將會收到正值;否則,為負值
if(timestamp != 0){
// 得到兩次檢測到手機旋轉的時間差(納秒),並將其轉化為秒
final float dT = (event.timestamp - timestamp) * NS2S;
// 將手機在各個軸上的旋轉角度相加,即可得到當前位置相對於初始位置的旋轉弧度
angle[0] += event.values[0] * dT;
angle[1] += event.values[1] * dT;
angle[2] += event.values[2] * dT;
// 將弧度轉化為角度
float anglex = (float) Math.toDegrees(angle[0]);
float angley = (float) Math.toDegrees(angle[1]);
float anglez = (float) Math.toDegrees(angle[2]);
System.out.println("anglex------------>" + anglex);
System.out.println("angley------------>" + angley);
System.out.println("anglez------------>" + anglez);
System.out.println("gyroscopeSensor.getMinDelay()----------->" +
gyroscopeSensor.getMinDelay());
}
//將當前時間賦值給timestamp
timestamp = event.timestamp;
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// TODO Auto-generated method stub
}
@Override
public void onPause() {
// TODO Auto-generated method stub
super.onPause();
sensorManager.unregisterListener(this);
}
}
 插入排序和希爾排序
插入排序和希爾排序
插入排序和希爾排序插入排序:插入排序由n-1趟排序組成。第 i 趟排序前,保證從位置 0 到位置i-1 上的元素已經是排序狀態(這是插入排序正確的原因,也是前提條件)。所
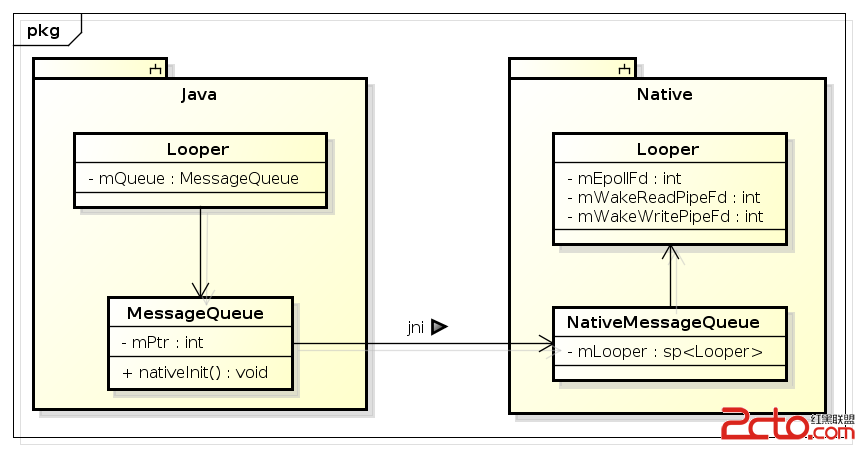 Android消息處理機制(Handler、Looper、MessageQueue與Message)
Android消息處理機制(Handler、Looper、MessageQueue與Message)
Android消息處理機制(Handler、Looper、MessageQueue與Message) Android是消息驅動的,實現消息驅動有幾個要素: 消息的表示
 自定義控件之創建可以復用的組合控件(三)
自定義控件之創建可以復用的組合控件(三)
自定義控件之創建可以復用的組合控件(三) 前面已學習了兩種自定義控件的實現,分別是自定義控件之對現有控件拓展(一)和 自定義控件之直接繼承View創建全新視圖(二),
 easy touch利用playmaker拖動ngui對象
easy touch利用playmaker拖動ngui對象
easy touch利用playmaker拖動ngui對象 最近在學習unity3d的幾個插件。easy touch,playmaker,ngui。為了使幾個能夠一起