編輯:關於android開發
一直沒時間寫博客,最近抽時間寫了些關於在ORB_SLAM2在Android上的移植過程,也算是點經驗吧。
寫完後一個手賤點了個鏈接,瞬間1/3工作量沒了,深夜弄完也是醉了。。。
正文開始
這篇博客講述如何在Android平台上移植ORB_SLAM2,講述過程包括基本的Android環境的搭建和NDK環境的配置,Android下移植的基本概念,ORB的具體移植步驟等。
系統:windows7 32bit
IDE:Eclipse Luna
環境工具: ADT24.0.2、Android SDK、NDK r10b
PS:不推薦使用集成了ADT環境的Eclipse版本,因為在NDK編譯的時候可能會報各種莫名其妙的錯。同時默認JDK環境已經裝好。
組件下載地址:百度網盤(包括ADT、NDK。SDK太大,請自行下載)
步驟:
安裝Eclipse,注意區分Eclipse是32位還是64位的,下載對應版本安裝即可。下載地址在前面給出。 下載ADT,不需要解壓。打開安裝好的Eclipse,在菜單欄點擊Help–>Install new software,彈出如下界面:

 更新SDK。點擊Window–>Android SDK manager,彈出如下界面:
更新SDK。點擊Window–>Android SDK manager,彈出如下界面:


NDK是集成的Android中調用C++代碼的工具包,核心是JNI(Java Native Interface)技術,具體這裡略過不表。只說說NDK開發的基本步驟:
1. 編寫Java代碼:在Java中定義一個類,比如說叫NDKHelper吧,裡面定義幾個java的方法,只需要聲明,不需要實現,如下所示:
public class NDKHelper {
//NDK示例方法1
public static native void ndkOne(int a,long b);
//NDK示例方法2
public static native int ndkTwo(String a,String b);
}
native標識符表示該函數將會利用C++代碼完成實現。
接下來在工程上右鍵,Android Tools–>Add native support,出現如下界面:

名字就是最後我們要生成的庫的名字,隨便填,可修改。點擊確定就會給你的工程添加C++編譯支持,菜單欄會多了個小錘子:

這個是用來編譯C++的快捷鍵。在你的工程目錄下會新建jni目錄和obj目錄,其中jni目錄用來存放和C++代碼有關的東西,obj則存放C++進行編譯時產生的中間件,最後生成的library會寫入到libs文件夾下。
在jni文件夾中生成了如下文件,一個.cpp,一個Android.mk,其中.cpp是自動生成的,是用來編寫C++部分的,而Android.mk類似C++裡面的CMakeList,用來指定需要編譯的文件和編譯生成的模塊名,一個最簡單的Android.mk文件如下所示:
LOCAL_PATH := $(call my-dir)
include $(CLEAR_VARS)
LOCAL_MODULE := NDKTest
LOCAL_SRC_FILES := NDKTest.cpp
include $(BUILD_SHARED_LIBRARY)
LOCAL_PATH :=$(call my-dir)表示包含當前目錄。
include $(CLEAR_VARS)表示清除全部非系統變量和部分系統變量;
LOCAL_MODULE := NDKTest 表示當前生成的模塊名,最終會生成libNDKTest.so文件
LOCAL_SRC_FILES := NDKTest.cpp 表示當前需要編譯的cpp文件;
include $(BUILD_SHARED_LIBRARY) 表示生成共享庫,需要生成靜態庫請修改成BUILD_STATIC_LIBRARY。
其他基礎命令:
LOCAL_C_INCLUDES:= 表示添加頭文件進入編譯環境
LOCAL_LDLIBS:= 表示添加系統靜態庫
LOCAL_SHARED_LIBRARIES:= 表示添加共享庫
其他命令請自行查看API文檔。
這裡指定了進行編譯時的各項條件,如果需要指定編譯器版本和編譯目標平台等信息,則需要在jni目錄下新建Application.mk文件,基本語句如下:
APP_STL := gnustl_static
APP_CPPFLAGS := -frtti -fexceptions
NDK_TOOLCHAIN_VERSION := 4.8
APP_ABI :=armeabi-v7a
APP_STL :=表示使用stl庫,APP_CPPFLAGS表示一些CPP編譯參數,NDK_TOOLCHAIN_VERSION 表示NDK使用的編譯器版本,APP_ABI表示編譯的目標平台,可以指定多個平台,平台之間用空格隔開,或者指定all則為全平台編譯(armeabi,armeabi-v7a,mips,x86)。其他命令請自行查看API。
接下來編寫對應的C++文件。
打開eclipse,點擊Project–>build Project(若build automatically已勾選則會自動編譯)打開命令行,cd到你的工程文件夾下的bin–>classes文件夾下,輸入如下命令:

javah com.example.ndktest.NDKHelper
回車,則在你的classes文件夾下會生成對應的頭文件。這裡com.example.ndktest是你的package名字,NDKHelper是你的NDK函數的類名。
生成的頭文件如下:
/* DO NOT EDIT THIS FILE - it is machine generated */
#include
/* Header for class com_example_ndktest_NDKHelper */
#ifndef _Included_com_example_ndktest_NDKHelper
#define _Included_com_example_ndktest_NDKHelper
#ifdef __cplusplus
extern "C" {
#endif
/*
* Class: com_example_ndktest_NDKHelper
* Method: ndkOne
* Signature: (IJ)V
*/
JNIEXPORT void JNICALL Java_com_example_ndktest_NDKHelper_ndkOne
(JNIEnv *, jclass, jint, jlong);
/*
* Class: com_example_ndktest_NDKHelper
* Method: ndkTwo
* Signature: (Ljava/lang/String;Ljava/lang/String;)I
*/
JNIEXPORT jint JNICALL Java_com_example_ndktest_NDKHelper_ndkTwo
(JNIEnv *, jclass, jstring, jstring);
#ifdef __cplusplus
}
#endif
#endif
其他不用管,我們關注中間的兩個函數聲明:
JNIEXPORT void JNICALL Java_com_example_ndktest_NDKHelper_ndkOne(JNIEnv *, jclass, jint, jlong);
這個函數就是NDKHelper類中ndkOne函數對應的C++版本,其中JNIEXPORT和JNICALL是固定字段,void是函數返回值,函數名由Java字段+包名+類名+函數名組成,參數則多了幾個JNI的系統參數JNIEnv 和jclass,其他的就是NDKHelper類中的對應參數,ndk會對該函數進行解析和鏈接,實現java和C++的對接。
將生成的.h頭文件復制到jni目錄下,新建對應的cpp文件,將該頭文件include進來並對對應函數進行實現,實現過程就視函數功能而定。
這些工作完成後需要修改你的Android.mk文件,將剛剛新建的cpp和h文件包括進來。
然後點擊開始那個小錘子或者直接項目右鍵RunAs–>Android Application,則C++部分會開始編譯,編譯具體過程可以在Eclipse下方Console窗口看到(如果沒有Console窗口則點擊Window–>Show Views,選擇Console確定即可)。
編譯完成後會生成對應的庫存放在libs目錄下,則你可以開始在Java裡面調用剛才定義的ndkOne和ndkTwo函數實現具體的功能。
NDK基礎到此為止,更深入的學習可以下載Android官方給的ndk samples.
不想知道移植過程的童鞋可以直接下載我的Github源碼:https://github.com/FangGet/ORB_SLAM2_Android 直接按照步驟進行即可。
移植過程
先看目錄:

分為ORB和ThirdParty,其中ThirdParty包括boost clapack DBow2 g2o eigen3。
clapack和eigen來自於一個github的開源庫:https://github.com/simonlynen/android_libs 這裡集成了一些經典的C++庫的ndk版本,下載即可使用。g2o和DBoW2則來自於ORB_SLAM2原作者的github地址,Boost是自己編譯的lib,這裡只介紹clapack和opencv的庫配置。
clapack配置
從前述的開源庫中將clapack目錄拷貝到Thirdparty的對應目錄下,clapack中已經包含了對當前目錄極其子目錄的編譯過程,我們在jni目錄下的Android.mk文件中加入如下內容:
include $(CLEAR_VARS)
MAINDIR:= $(LOCAL_PATH)
include $(MAINDIR)/Thirdparty/clapack/Android.mk
LOCAL_PATH := $(MAINDIR)
include $(CLEAR_VARS)
MAINDIR:= $(LOCAL_PATH)
LOCAL_MODULE:= lapack
LOCAL_SHORT_COMMANDS := true
LOCAL_STATIC_LIBRARIES := tmglib clapack blas f2c
LOCAL_EXPORT_C_INCLUDES := $(LOCAL_C_INCLUDES)
LOCAL_PATH := $(MAINDIR)
include $(BUILD_SHARED_LIBRARY)
這裡的基本命令之前都已經講過了,只補充如下幾點內容:
LOCAL_SHORT_COMMANDS是為了防止Windows對G++編譯命令長度的限制而設置的參數,該參數會拖慢整個編譯過程,因此請謹慎使用; LOCAL_EXPORT_C_INCLUDES表示將當前庫的頭文件EXPORT給系統,讓程序代碼中能實現<>的調用過程,若不設置這一參數則在cpp文件中可能無法引用該庫; LOCAL_STATIC_LIBRARIES := tmglib clapack blas f2c是引用lapack子目錄中編譯好的一些依賴模塊
OPENCV_LIB_TYPE:=STATIC
ifeq ("$(wildcard $(OPENCV_MK_PATH))","")
#try to load OpenCV.mk from default install location
include E:/ORB_SLAM2/OpenCV-2.4.9-android-sdk/sdk/native/jni/OpenCV.mk
else
include $(OPENCV_MK_PATH)
endif
這裡opencv.mk我給的是絕對地址,其實相對地址也是可以的。上面這段引用會將opencv進行編譯並引入到當前的工作模塊上來,這裡就完成了opencv庫的基本調用。如果為了方便還可以將opencv自身單獨編譯成一個庫工程並開放給其他模塊引用。
其他libraries的編譯過程和上述工程大同小異,其主要步驟可以概括如下:
將當前庫復制到jni的特定目錄下; 在Android.mk中新建一個模塊並對模塊進行命名; LOCAL_C_INCLUDE引入庫的頭文件,LOCAL_SRC_FILES引入庫的cpp文件; LOCAL_LDLIBS/LOCAL_SHARED_LIBRARIES/LOCAL_STATIC_LIBRARIES引入依賴庫; LOCAL_C_FLAGS設置編譯參數;ORB_SLAM2的編譯
這裡我們將ORB_SLAM2的源文件也編譯為一個library以供調用,其編譯過程和上面雷同,需要注意的是,由於pangolin編譯有問題,我拆了源文件的pangolin部分並注釋了對應的部分代碼,同時引入了opengl es 來進行map和pose的繪制。同時,為了完成特征檢測圖像的回調,我改變了System.cc中TrackMonocular的返回值,將其返回值改成了Mat。
當上述過程完成後,我們的C++編譯工作就基本完成了,最後也是最重要的一步是為Java中定義的native方法做C++的實現,在JAVA中,我定義了如下native函數:
/**
* jni中初始化SLAM系統
* @param VOCPath
* @param calibrationPath
*/
public static native void initSystemWithParameters(String VOCPath,String calibrationPath);
/**
* Dataset模式中ORB系統的start函數
* @param curTimeStamp
* @param data
* @param w
* @param h
* @return
*/
public static native int[] startCurrentORB(double curTimeStamp,int[] data,int w,int h);
/**
* Camera模式中ORB系統的start
* @param curTimeStamp
* @param addr
* @param w
* @param h
* @return
*/
public native static int[] startCurrentORBForCamera(double curTimeStamp,long addr,int w,int h);
/**
* Opengl es 的初始化
*/
public native static void glesInit();
/**
* opengl es繪制更新
*/
public native static void glesRender();
/**
* 防止opengl es窗口resize帶來的影響
* @param width
* @param height
*/
public native static void glesResize(int width, int height);
其對應的C++代碼為:
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: initSystemWithParameters
* Signature: (Ljava/lang/String;Ljava/lang/String;)V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_initSystemWithParameters
(JNIEnv * env, jclass cls, jstring VOCPath, jstring calibrationPath) {
const char *calChar = env->GetStringUTFChars(calibrationPath, JNI_FALSE);
const char *vocChar = env->GetStringUTFChars(VOCPath, JNI_FALSE);
// use your string
std::string voc_string(vocChar);
std::string cal_string(calChar);
env->GetJavaVM(&jvm);
jvm->AttachCurrentThread(&env, NULL);
s=new ORB_SLAM2::System(voc_string,cal_string,ORB_SLAM2::System::MONOCULAR,true);
env->ReleaseStringUTFChars(calibrationPath, calChar);
env->ReleaseStringUTFChars(VOCPath, vocChar);
init_end=true;
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: startCurrentORB
* Signature: (DDD[I)[I
*/
JNIEXPORT jintArray JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_startCurrentORB(
JNIEnv * env, jclass cls, jdouble curTimeStamp, jintArray buf, jint w,
jint h) {
jint *cbuf;
cbuf = env->GetIntArrayElements(buf, false);
if (cbuf == NULL) {
return 0;
}
int size = w * h;
cv::Mat myimg(h, w, CV_8UC4, (unsigned char*) cbuf);
cv::Mat ima = s->TrackMonocular(myimg, curTimeStamp);
jintArray resultArray = env->NewIntArray(ima.rows * ima.cols);
jint *resultPtr;
resultPtr = env->GetIntArrayElements(resultArray, false);
for (int i = 0; i < ima.rows; i++)
for (int j = 0; j < ima.cols; j++) {
int R = ima.at < Vec3b > (i, j)[0];
int G = ima.at < Vec3b > (i, j)[1];
int B = ima.at < Vec3b > (i, j)[2];
resultPtr[i * ima.cols + j] = 0xff000000 + (R << 16) + (G << 8) + B;
}
env->ReleaseIntArrayElements(resultArray, resultPtr, 0);
env->ReleaseIntArrayElements(buf, cbuf, 0);
return resultArray;
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesInit
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesInit
(JNIEnv *env, jclass cls) {
// 啟用陰影平滑
glShadeModel(GL_SMOOTH);
// 黑色背景
glClearColor(1.0f, 1.0f, 1.0f, 0.0f);
// 設置深度緩存
glClearDepthf(1.0f);
// 啟用深度測試
glEnable(GL_DEPTH_TEST);
// 所作深度測試的類型
glDepthFunc(GL_LEQUAL);
// 告訴系統對透視進行修正
glHint(GL_PERSPECTIVE_CORRECTION_HINT, GL_NICEST);
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesRender
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesRender
(JNIEnv * env, jclass cls) {
glClear (GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glMatrixMode (GL_MODELVIEW);
glLoadIdentity ();
if(init_end)
s->drawGL();
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: glesResize
* Signature: (II)V
*/
JNIEXPORT void JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_glesResize
(JNIEnv *env, jclass cls, jint width, jint height) {
//圖形最終顯示到屏幕的區域的位置、長和寬
glViewport (0,0,width,height);
//指定矩陣
glMatrixMode (GL_PROJECTION);
//將當前的矩陣設置為glMatrixMode指定的矩陣
glLoadIdentity ();
glOrthof(-2, 2, -2, 2, -2, 2);
}
/*
* Class: orb_slam2_android_nativefunc_OrbNdkHelper
* Method: readShaderFile
* Signature: (Landroid/content/res/AssetManager;)V
*/
JNIEXPORT jintArray JNICALL Java_orb_slam2_android_nativefunc_OrbNdkHelper_startCurrentORBForCamera
(JNIEnv *env, jclass cls,jdouble timestamp, jlong addr,jint w,jint h) {
const cv::Mat *im = (cv::Mat *) addr;
cv::Mat ima = s->TrackMonocular(*im, timestamp);
jintArray resultArray = env->NewIntArray(ima.rows * ima.cols);
jint *resultPtr;
resultPtr = env->GetIntArrayElements(resultArray, false);
for (int i = 0; i < ima.rows; i++)
for (int j = 0; j < ima.cols; j++) {
int R = ima.at < Vec3b > (i, j)[0];
int G = ima.at < Vec3b > (i, j)[1];
int B = ima.at < Vec3b > (i, j)[2];
resultPtr[i * ima.cols + j] = 0xff000000 + (R << 16) + (G << 8) + B;
}
env->ReleaseIntArrayElements(resultArray, resultPtr, 0);
return resultArray;
}
這裡解釋下Dataset和Camera模式下start方法的區別。其實就是圖像參數傳遞的方式不一樣。在DataSet模式中,我們是用ImageView顯示圖片,用Bitmap讀取文件中的圖片,而非基本類型的數據都是不能被jni接口所接受的因此我們需要利用Bitmap的getPixels方法將其轉換成intp[型數據進行傳遞,在jni中int[]對應的數據類型為jintArray,我們可以在獲取到數據後將jintArray轉換成Mat進行後續處理;而在Camera模式中我們是利用opencv android sdk中的cvCameraView 來直接進行攝像頭的調用和圖像的顯示。其onCameraFrame(CvCameraViewFrame inputFrame)中的inputfram可以通過rgba()方法轉換成Mat類型數據,而Mat類型同樣不被jni識別,因此需要利用Mat的getNativeObjAddr方法獲取Mat數據的long型指針傳遞到jni中進行處理。
當上述步驟都完成後,我們會得到最終生成的sdk。Android部分的布局文件和對應activity文件在這裡也略過不表。當得到最終生成的apk後,我們如果要測試Camera模式,需要先將opencv4Android中apk文件夾中對應類型的opencv manager安裝到手機中並預先打開才能使用,否則會提示找不到opencv的支持庫;若只需測試Dataset模式則無需上述步驟。
水平有限,如有錯誤請不吝指正,謝謝。
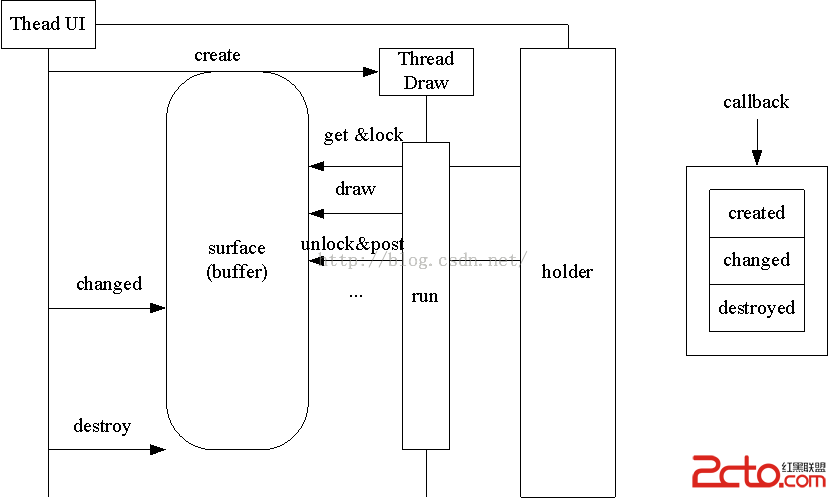 Android surfaceview詳解(一)
Android surfaceview詳解(一)
Android surfaceview詳解(一) surface,這個單詞的意思是浮在表面的,那麼surfaceview就是浮在表面的view了。如果真的這樣解釋,估計有
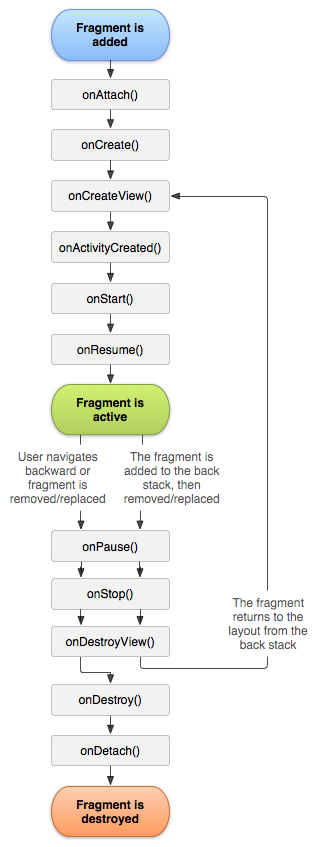 Android Activity生命周期以及Fragment生命周期的區別與分析,androidfragment
Android Activity生命周期以及Fragment生命周期的區別與分析,androidfragment
Android Activity生命周期以及Fragment生命周期的區別與分析,androidfragmentAndroid Fragment生命周期圖: Activ
 Android Material Design 兼容庫的使用,androidmaterial
Android Material Design 兼容庫的使用,androidmaterial
Android Material Design 兼容庫的使用,androidmaterialAndroid Material Design 兼容庫的使用 mecury
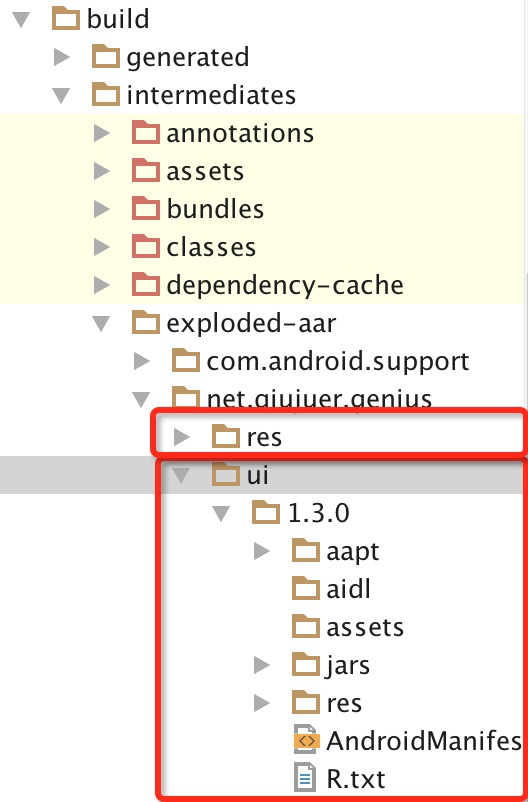 Android Eclipse 導入 AS Gradle AAR 庫手冊
Android Eclipse 導入 AS Gradle AAR 庫手冊
Android Eclipse 導入 AS Gradle AAR 庫手冊 序言 這是一篇半技術類文章。眾所周知現在Google主推Android Studio開發工具,而