編輯:Android資訊
基於Android 6.0源碼, 來分析存儲相關架構,涉及源碼:
Android 存儲系統之源碼篇
Android 存儲系統之架構篇
/framework/base/services/java/com/android/server/SystemServer.java /framework/base/services/core/java/com/android/server/MountService.java /framework/base/services/core/java/com/android/server/NativeDaemonConnector.java /framework/base/services/core/java/com/android/server/NativeDaemonEvent.java /framework/base/core/java/android/os/storage/IMountService.java /framework/base/core/java/android/os/storage/IMountServiceListener.java /framework/base/core/java/android/os/storage/StorageManager.java /system/vold/Main.cpp /system/vold/VolumeManager.cpp /system/vold/NetlinkManager.cpp /system/vold/NetlinkHandler.cpp /system/vold/CommandListener.cpp /system/vold/VoldCommand.cpp /system/vold/VolumeBase.cpp /system/vold/PublicVolume.cpp /system/vold/EmulatedVolume.cpp /system/vold/PublicVolume.cpp /system/vold/Disk.cpp /system/core/libsysutils/src/NetlinkListener.cpp /system/core/libsysutils/src/SocketListener.cpp /system/core/libsysutils/src/FrameworkListener.cpp /system/core/libsysutils/src/FrameworkCommand.cpp /system/core/include/sysutils/NetlinkListener.h /system/core/include/sysutils/SocketListener.h /system/core/include/sysutils/FrameworkListener.h /system/core/include/sysutils/FrameworkCommand.h
本文主要介紹跟存儲相關的模塊MountService和Vold的整體流程與架構設計.
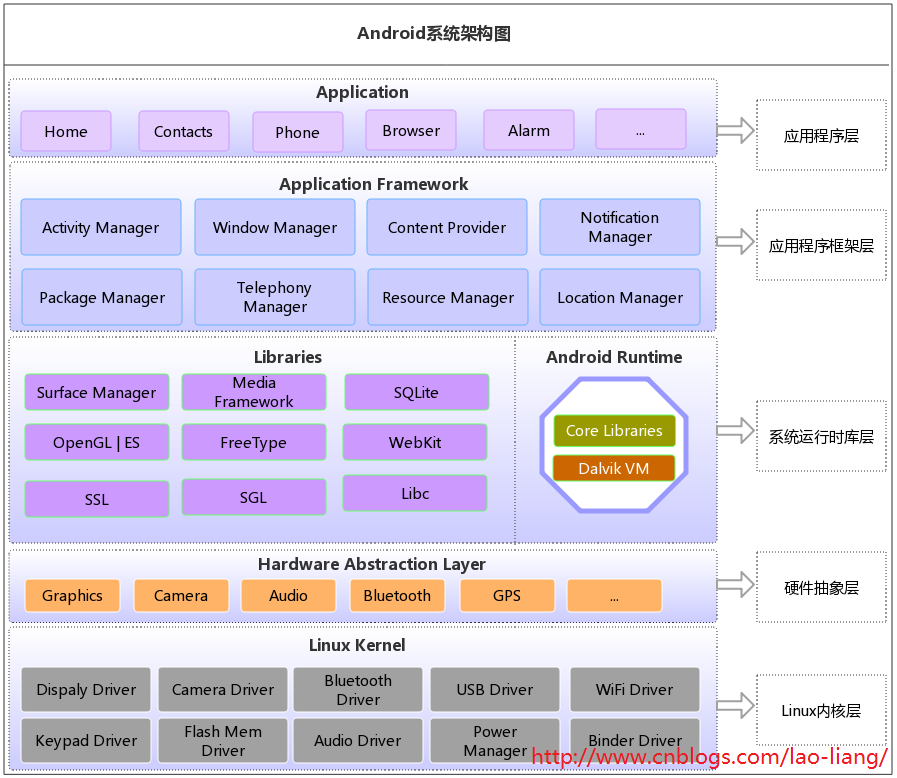
MountService向Vold發送掛載SD卡的命令,或者接收到來自Vold的外設熱插拔事件。MountService運行在system_server進程,在系統啟動到階段PHASE_WAIT_FOR_DEFAULT_DISPLAY後,進入startOtherServices會啟動MountService.
[-> SystemServer.java]
private void startOtherServices() {
...
IMountService mountService = null;
//啟動MountService服務,【見小節2.2】
mSystemServiceManager.startService(MOUNT_SERVICE_CLASS);
//等價new IMountService.Stub.Proxy(),即獲取MountService的proxy對象
mountService = IMountService.Stub.asInterface(
ServiceManager.getService("mount"));
...
mActivityManagerService.systemReady(new Runnable() {
public void run() {
//啟動到階段550【見小節2.7】
mSystemServiceManager.startBootPhase(
SystemService.PHASE_ACTIVITY_MANAGER_READY);
...
});
}
NotificationManagerService依賴於MountService,比如media/usb通知事件,所以需要先啟動MountService。此處MOUNT_SERVICE_CLASS=com.android.server.MountService$Lifecycle.
mSystemServiceManager.startService(MOUNT_SERVICE_CLASS)主要完成3件事:
mServices服務列表;[-> MountService.java]
class MountService extends IMountService.Stub
implements INativeDaemonConnectorCallbacks, Watchdog.Monitor {
public static class Lifecycle extends SystemService {
public void onStart() {
//創建MountService對象【見小節2.3】
mMountService = new MountService(getContext());
//登記Binder服務
publishBinderService("mount", mMountService);
}
...
}
...
}
創建MountService對象,並向Binder服務的大管家ServiceManager登記,該服務名為“mount”,對應服務對象為mMountService。登記之後,其他地方當需要MountService的服務時便可以通過服務名來向ServiceManager來查詢具體的MountService服務。
[-> MountService.java]
public MountService(Context context) {
sSelf = this;
mContext = context;
//FgThread線程名為“"android.fg",創建IMountServiceListener回調方法【見小節2.4】
mCallbacks = new Callbacks(FgThread.get().getLooper());
//獲取PKMS的Client端對象
mPms = (PackageManagerService) ServiceManager.getService("package");
//創建“MountService”線程
HandlerThread hthread = new HandlerThread(TAG);
hthread.start();
mHandler = new MountServiceHandler(hthread.getLooper());
//IoThread線程名為"android.io",創建OBB操作的handler
mObbActionHandler = new ObbActionHandler(IoThread.get().getLooper());
File dataDir = Environment.getDataDirectory();
File systemDir = new File(dataDir, "system");
mLastMaintenanceFile = new File(systemDir, LAST_FSTRIM_FILE);
//判斷/data/system/last-fstrim文件,不存在則創建,存在則更新最後修改時間
if (!mLastMaintenanceFile.exists()) {
(new FileOutputStream(mLastMaintenanceFile)).close();
...
} else {
mLastMaintenance = mLastMaintenanceFile.lastModified();
}
...
//將MountServiceInternalImpl登記到sLocalServiceObjects
LocalServices.addService(MountServiceInternal.class, mMountServiceInternal);
//創建用於VoldConnector的NDC對象【見小節2.5】
mConnector = new NativeDaemonConnector(this, "vold", MAX_CONTAINERS * 2, VOLD_TAG, 25,
null);
mConnector.setDebug(true);
//創建線程名為"VoldConnector"的線程,用於跟vold通信【見小節2.6】
Thread thread = new Thread(mConnector, VOLD_TAG);
thread.start();
//創建用於CryptdConnector工作的NDC對象
mCryptConnector = new NativeDaemonConnector(this, "cryptd",
MAX_CONTAINERS * 2, CRYPTD_TAG, 25, null);
mCryptConnector.setDebug(true);
//創建線程名為"CryptdConnector"的線程,用於加密
Thread crypt_thread = new Thread(mCryptConnector, CRYPTD_TAG);
crypt_thread.start();
//注冊監聽用戶添加、刪除的廣播
final IntentFilter userFilter = new IntentFilter();
userFilter.addAction(Intent.ACTION_USER_ADDED);
userFilter.addAction(Intent.ACTION_USER_REMOVED);
mContext.registerReceiver(mUserReceiver, userFilter, null, mHandler);
//內部私有volume的路徑為/data,該volume通過dumpsys mount是不會顯示的
addInternalVolume();
//默認為false
if (WATCHDOG_ENABLE) {
Watchdog.getInstance().addMonitor(this);
}
}
其主要功能依次是:
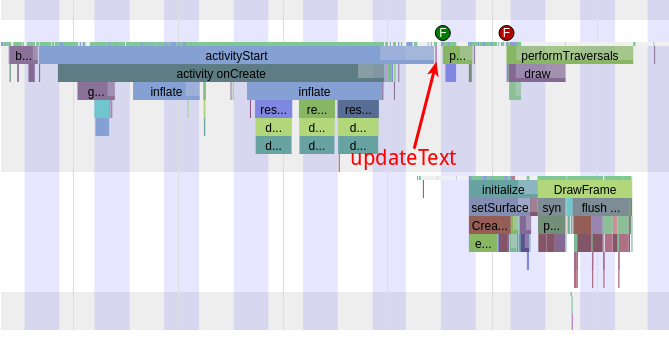
從這裡便可知道共創建了3個線程:”MountService”,”VoldConnector”,”CryptdConnector”,另外還會使用到系統進程中的兩個線程”android.fg”和”android.io”. 這便是在文章開頭進程架構圖中Java framework層進程的創建情況.
接下來再分別看看MountService創建過程中的Callbacks實例化, NativeDaemonConnector實例化,以及”vold”線程的運行.
class MountService {
...
private static class Callbacks extends Handler {
private final RemoteCallbackList<IMountServiceListener>
mCallbacks = new RemoteCallbackList<>();
public Callbacks(Looper looper) {
super(looper);
}
...
}
}
創建Callbacks時的Looper為FgThread.get().getLooper(),其中FgThread采用單例模式,是一個線程名為”android.fg”的HandlerThread。另外,Callbacks對象有一個成員變量mCallbacks,如下:
[-> RemoteCallbackList.java]
public class RemoteCallbackList<E extends IInterface> {
ArrayMap<IBinder, Callback> mCallbacks
= new ArrayMap<IBinder, Callback>();
//Binder死亡通知
private final class Callback implements IBinder.DeathRecipient {
public void binderDied() {
...
}
}
//注冊死亡回調
public boolean register(E callback, Object cookie) {
synchronized (mCallbacks) {
...
IBinder binder = callback.asBinder();
Callback cb = new Callback(callback, cookie);
binder.linkToDeath(cb, 0);
mCallbacks.put(binder, cb);
...
}
}
...
}
通過register()方法添加IMountServiceListener對象信息到mCallbacks成員變量。RemoteCallbackList的內部類Callback繼承於IBinder.DeathRecipient,很顯然這是死亡通知,當binder服務端進程死亡後,回調binderDied方法通知binder客戶端進行相應地處理。
[-> NativeDaemonConnector.java]
NativeDaemonConnector(INativeDaemonConnectorCallbacks callbacks, String socket,
int responseQueueSize, String logTag, int maxLogSize, PowerManager.WakeLock wl) {
this(callbacks, socket, responseQueueSize, logTag, maxLogSize, wl,
FgThread.get().getLooper());
}
NativeDaemonConnector(INativeDaemonConnectorCallbacks callbacks, String socket,
int responseQueueSize, String logTag, int maxLogSize, PowerManager.WakeLock wl,
Looper looper) {
mCallbacks = callbacks;
//socket名為"vold"
mSocket = socket;
//對象響應個數為500
mResponseQueue = new ResponseQueue(responseQueueSize);
mWakeLock = wl;
if (mWakeLock != null) {
mWakeLock.setReferenceCounted(true);
}
mLooper = looper;
mSequenceNumber = new AtomicInteger(0);
//TAG為"VoldConnector"
TAG = logTag != null ? logTag : "NativeDaemonConnector";
mLocalLog = new LocalLog(maxLogSize);
}
mPendingCmds數據類型為LinkedList,記錄著vold進程上報的響應事件,事件個數上限為500。[-> NativeDaemonConnector.java]
final class NativeDaemonConnector implements Runnable, Handler.Callback, Watchdog.Monitor {
public void run() {
mCallbackHandler = new Handler(mLooper, this);
while (true) {
try {
//監聽vold的socket【見小節2.13】
listenToSocket();
} catch (Exception e) {
loge("Error in NativeDaemonConnector: " + e);
SystemClock.sleep(5000);
}
}
}
}
在線程VoldConnector中建立了名為vold的socket的客戶端,通過循環方式不斷監聽Vold服務端發送過來的消息。 另外,同理還有一個線程CryptdConnector也采用類似的方式,建立了cryptd`的socket客戶端,監聽Vold中另個線程發送過來的消息。到此,MountService與NativeDaemonConnector都已經啟動,那麼接下來到系統啟動到達階段PHASE_ACTIVITY_MANAGER_READY,則調用到onBootPhase方法。
[-> MountService.java ::Lifecycle]
由於MountService的內部Lifecycle已添加SystemServiceManager的mServices服務列表;系統啟動到PHASE_ACTIVITY_MANAGER_READY時會回調mServices中的onBootPhase方法
public static class Lifecycle extends SystemService {
public void onBootPhase(int phase) {
if (phase == SystemService.PHASE_ACTIVITY_MANAGER_READY) {
mMountService.systemReady();
}
}
}
再調用MountService.systemReady方法,該方法主要是通過mHandler發送消息。
private void systemReady() {
mSystemReady = true;
mHandler.obtainMessage(H_SYSTEM_READY).sendToTarget();
}
此處mHandler = new MountServiceHandler(hthread.getLooper()),采用的是線程”MountService”中的Looper。到此system_server主線程通過handler向線程”MountService”發送H_SYSTEM_READY消息,接下來進入線程”MountService”的MountServiceHandler對象(簡稱MSH)的handleMessage()來處理相關的消息。
[-> MountService.java ::MountServiceHandler]
class MountServiceHandler extends Handler {
public void handleMessage(Message msg) {
switch (msg.what) {
case H_SYSTEM_READY: {
handleSystemReady(); //【見小節2.9】
break;
}
...
}
}
}
[-> MountService.java]
private void handleSystemReady() {
synchronized (mLock) {
//【見小節2.10】
resetIfReadyAndConnectedLocked();
}
//計劃執行日常的fstrim操作【】
MountServiceIdler.scheduleIdlePass(mContext);
}
[-> MountService.java]
private void resetIfReadyAndConnectedLocked() {
Slog.d(TAG, "Thinking about reset, mSystemReady=" + mSystemReady
+ ", mDaemonConnected=" + mDaemonConnected);
//當系統啟動到階段550,並且已經與vold守護進程建立連接,則執行reset
if (mSystemReady && mDaemonConnected) {
killMediaProvider();
mDisks.clear();
mVolumes.clear();
//將/data為路徑的private volume添加到mVolumes
addInternalVolume();
try {
//【見小節2.11】
mConnector.execute("volume", "reset");
//告知所有已經存在和啟動的users
final UserManager um = mContext.getSystemService(UserManager.class);
final List<UserInfo> users = um.getUsers();
for (UserInfo user : users) {
mConnector.execute("volume", "user_added", user.id, user.serialNumber);
}
for (int userId : mStartedUsers) {
mConnector.execute("volume", "user_started", userId);
}
} catch (NativeDaemonConnectorException e) {
Slog.w(TAG, "Failed to reset vold", e);
}
}
}
[-> NativeDaemonConnector.java]
public NativeDaemonEvent execute(String cmd, Object... args)
throws NativeDaemonConnectorException {
return execute(DEFAULT_TIMEOUT, cmd, args);
}
其中DEFAULT_TIMEOUT=1min,即命令執行超時時長為1分鐘。經過層層調用,executeForList()
public NativeDaemonEvent[] executeForList(long timeoutMs, String cmd, Object... args)
throws NativeDaemonConnectorException {
final long startTime = SystemClock.elapsedRealtime();
final ArrayList<NativeDaemonEvent> events = Lists.newArrayList();
final StringBuilder rawBuilder = new StringBuilder();
final StringBuilder logBuilder = new StringBuilder();
//mSequenceNumber初始化值為0,每執行一次該方法則進行加1操作
final int sequenceNumber = mSequenceNumber.incrementAndGet();
makeCommand(rawBuilder, logBuilder, sequenceNumber, cmd, args);
//例如:“3 volume reset”
final String rawCmd = rawBuilder.toString();
final String logCmd = logBuilder.toString();
log("SND -> {" + logCmd + "}");
synchronized (mDaemonLock) {
//將cmd寫入到socket的輸出流
mOutputStream.write(rawCmd.getBytes(StandardCharsets.UTF_8));
...
}
NativeDaemonEvent event = null;
do {
//【見小節2.12】
event = mResponseQueue.remove(sequenceNumber, timeoutMs, logCmd);
events.add(event);
//當收到的事件響應碼屬於[100,200)區間,則繼續等待後續事件上報
} while (event.isClassContinue());
final long endTime = SystemClock.elapsedRealtime();
//對於執行時間超過500ms則會記錄到log
if (endTime - startTime > WARN_EXECUTE_DELAY_MS) {
loge("NDC Command {" + logCmd + "} took too long (" + (endTime - startTime) + "ms)");
}
...
return events.toArray(new NativeDaemonEvent[events.size()]);
}
首先,將帶執行的命令mSequenceNumber執行加1操作,再將cmd(例如3 volume reset)寫入到socket的輸出流,通過循環與poll機制等待執行底層響應該操作結果,否則直到1分鐘超時才結束該方法。即便收到底層的響應碼,如果響應碼屬於[100,200)區間,則繼續阻塞等待後續事件上報。
[-> MountService.java ::ResponseQueue]
private static class ResponseQueue {
public NativeDaemonEvent remove(int cmdNum, long timeoutMs, String logCmd) {
PendingCmd found = null;
synchronized (mPendingCmds) {
//從mPendingCmds查詢cmdNum
for (PendingCmd pendingCmd : mPendingCmds) {
if (pendingCmd.cmdNum == cmdNum) {
found = pendingCmd;
break;
}
}
//如果已有的mPendingCmds中查詢不到,則創建一個新的PendingCmd
if (found == null) {
found = new PendingCmd(cmdNum, logCmd);
mPendingCmds.add(found);
}
found.availableResponseCount--;
if (found.availableResponseCount == 0) mPendingCmds.remove(found);
}
NativeDaemonEvent result = null;
try {
//采用poll輪詢方式等待底層上報該事件,直到1分鐘超時
result = found.responses.poll(timeoutMs, TimeUnit.MILLISECONDS);
} catch (InterruptedException e) {}
return result;
}
}
這裡用到poll,先來看看responses = new ArrayBlockingQueue<NativeDaemonEvent>(10),這是一個長度為10的可阻塞隊列。 這裡的poll也是阻塞的方式來輪詢事件。
[-> ArrayBlockingQueue.java]
public E poll(long timeout, TimeUnit unit) throws InterruptedException {
long nanos = unit.toNanos(timeout);
final ReentrantLock lock = this.lock;
//可中斷的鎖等待
lock.lockInterruptibly();
try {
//當隊列長度為空,循環等待
while (count == 0) {
if (nanos <= 0)
return null;
nanos = notEmpty.awaitNanos(nanos);
}
return extract();
} finally {
lock.unlock();
}
}
小知識:這裡用到了ReentrantLock同步鎖,該鎖跟synchronized有功能有很相似,用於多線程並發訪問。那麼ReentrantLock與synchronized相比,
ReentrantLock優勢:
ReentrantLock的劣勢:
再回到ResponseQueue.remove(),該方法中mPendingCmds中的內容是哪裡添加的呢?其實是在NDC.listenToSocket循環監聽到消息時添加的,則接下來看看監聽過程。
[-> NativeDaemonConnector.java]
private void listenToSocket() throws IOException {
LocalSocket socket = null;
try {
socket = new LocalSocket();
LocalSocketAddress address = determineSocketAddress();
//建立與"/dev/socket/vold"的socket連接
socket.connect(address);
InputStream inputStream = socket.getInputStream();
synchronized (mDaemonLock) {
mOutputStream = socket.getOutputStream();
}
//建立連接後,回調MS.onDaemonConnected【見小節2.15】
mCallbacks.onDaemonConnected();
byte[] buffer = new byte[BUFFER_SIZE];
int start = 0;
while (true) {
int count = inputStream.read(buffer, start, BUFFER_SIZE - start);
...
for (int i = 0; i < count; i++) {
if (buffer[i] == 0) {
final String rawEvent = new String(
buffer, start, i - start, StandardCharsets.UTF_8);
boolean releaseWl = false;
try {
//解析socket服務端發送的event
final NativeDaemonEvent event = NativeDaemonEvent.parseRawEvent(
rawEvent);
log("RCV <- {" + event + "}");
//當事件的響應碼區間為[600,700),則發送消息交由mCallbackHandler處理
if (event.isClassUnsolicited()) {
if (mCallbacks.onCheckHoldWakeLock(event.getCode())
&& mWakeLock != null) {
mWakeLock.acquire();
releaseWl = true;
}
if (mCallbackHandler.sendMessage(mCallbackHandler.obtainMessage(
event.getCode(), event.getRawEvent()))) {
releaseWl = false;
}
} else {
//對於其他的響應碼則添加到mResponseQueue隊列【見小節2.14】
mResponseQueue.add(event.getCmdNumber(), event);
}
} catch (IllegalArgumentException e) {
log("Problem parsing message " + e);
} finally {
if (releaseWl) {
mWakeLock.acquire();
}
}
start = i + 1;
}
}
...
}
} catch (IOException ex) {
throw ex;
} finally {
//收尾清理類工作,關閉mOutputStream, socket
...
}
}
這裡有一個動作是mResponseQueue.add(),通過該方法便能觸發ResponseQueue.poll阻塞操作繼續往下執行。
[-> NativeDaemonConnector.java]
private static class ResponseQueue {
public void add(int cmdNum, NativeDaemonEvent response) {
PendingCmd found = null;
synchronized (mPendingCmds) {
for (PendingCmd pendingCmd : mPendingCmds) {
if (pendingCmd.cmdNum == cmdNum) {
found = pendingCmd;
break;
}
}
//沒有找到則創建相應的PendingCmd
if (found == null) {
while (mPendingCmds.size() >= mMaxCount) {
PendingCmd pendingCmd = mPendingCmds.remove();
}
found = new PendingCmd(cmdNum, null);
mPendingCmds.add(found);
}
found.availableResponseCount++;
if (found.availableResponseCount == 0) mPendingCmds.remove(found);
}
try {
found.responses.put(response);
} catch (InterruptedException e) { }
}
}
[-> ArrayBlockingQueue.java]
public void put(E e) throws InterruptedException {
checkNotNull(e);
final ReentrantLock lock = this.lock;
lock.lockInterruptibly();
try {
//當隊列滿了則等待
while (count == items.length)
notFull.await();
insert(e);
} finally {
lock.unlock();
}
}
看完了如何向mPendingCmds中增加待處理的命令,再來回過來看看,當當listenToSocket剛開始監聽前,收到Native的Daemon連接後的執行操作.
[-> MountService.java]
public void onDaemonConnected() {
mDaemonConnected = true;
mHandler.obtainMessage(H_DAEMON_CONNECTED).sendToTarget();
}
當前主線程發送消息H_DAEMON_CONNECTED給線程MountService`,該線程收到消息後調用MountServiceHandler的handleMessage()相應分支後,進而調用handleDaemonConnected()方法。
private void handleDaemonConnected() {
synchronized (mLock) {
resetIfReadyAndConnectedLocked();
}
//類型為CountDownLatch,用於多線程同步,阻塞await()直到計數器為零
mConnectedSignal.countDown();
if (mConnectedSignal.getCount() != 0) {
return;
}
//調用PMS來加載ASECs
mPms.scanAvailableAsecs();
//用於通知ASEC掃描已完成
mAsecsScanned.countDown();
}
這裡的PMS.scanAvailableAsecs()經過層層調用,最終核心工作還是通過MountService.getSecureContainerList。
[-> MountService.java]
public String[] getSecureContainerList() {
enforcePermission(android.Manifest.permission.ASEC_ACCESS);
//等待mConnectedSignal計數鎖達到零
waitForReady();
//當沒有掛載Primary卷設備,則彈出警告
warnOnNotMounted();
try {
//向vold進程發送asec list命令
return NativeDaemonEvent.filterMessageList(
mConnector.executeForList("asec", "list"), VoldResponseCode.AsecListResult);
} catch (NativeDaemonConnectorException e) {
return new String[0];
}
}
這裡以一張簡單的流程圖來說明上述過程:

介紹完了Java framework層的MountService以及NativeDaemonConnector,往下走來到了Vold的世界.Vold是由開機過程中解析init.rc時啟動:
on post-fs-data
start vold //啟動vold服務
Vold的service定義如下:
service vold /system/bin/vold
class core
socket vold stream 0660 root mount
socket cryptd stream 0660 root mount
ioprio be 2
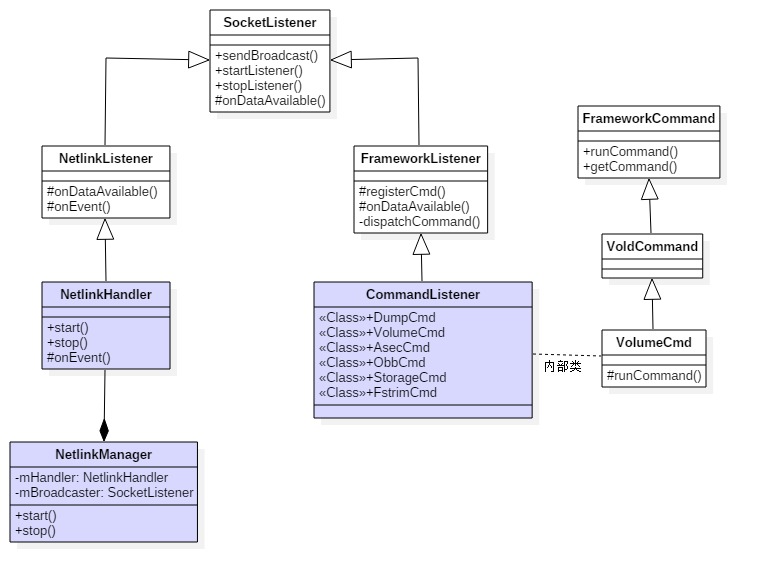
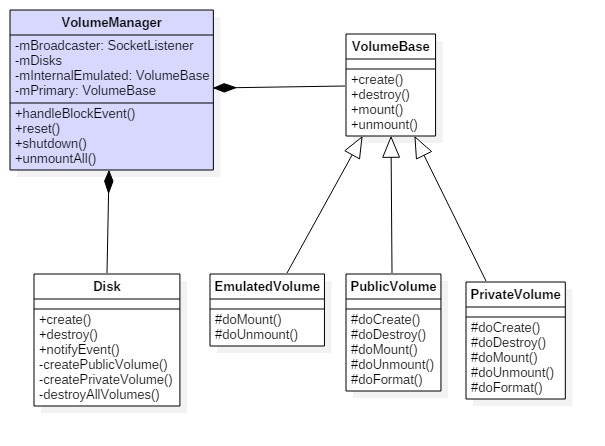
接下來便進入Vold的main(),在開啟新的征途之前,為了不被代碼弄暈,先來用一幅圖來介紹下這些核心類之間的關系以及主要方法,以方便更好的往下閱讀.
[-> system/vold/Main.cpp]
int main(int argc, char** argv) {
setenv("ANDROID_LOG_TAGS", "*:v", 1);
android::base::InitLogging(argv, android::base::LogdLogger(android::base::SYSTEM));
VolumeManager *vm;
CommandListener *cl;
CryptCommandListener *ccl;
NetlinkManager *nm;
//解析參數,設置contenxt
parse_args(argc, argv);
...
fcntl(android_get_control_socket("vold"), F_SETFD, FD_CLOEXEC);
fcntl(android_get_control_socket("cryptd"), F_SETFD, FD_CLOEXEC);
mkdir("/dev/block/vold", 0755);
//用於cryptfs檢查,並mount加密的文件系統
klog_set_level(6);
//創建單例對象VolumeManager 【見小節3.2.1】
if (!(vm = VolumeManager::Instance())) {
exit(1);
}
//創建單例對象NetlinkManager 【見小節3.3.1】
if (!(nm = NetlinkManager::Instance())) {
exit(1);
}
if (property_get_bool("vold.debug", false)) {
vm->setDebug(true);
}
// 創建CommandListener對象 【見小節3.4.1】
cl = new CommandListener();
// 創建CryptCommandListener對象 【見小節3.5.1】
ccl = new CryptCommandListener();
//【見小節3.2.2】
vm->setBroadcaster((SocketListener *) cl);
//【見小節3.3.2】
nm->setBroadcaster((SocketListener *) cl);
if (vm->start()) { //【見小節3.2.3】
exit(1);
}
process_config(vm); //【見小節3.2.4】
if (nm->start()) { //【見小節3.3.3】
exit(1);
}
coldboot("/sys/block");
//啟動響應命令的監聽器 //【見小節3.4.2】
if (cl->startListener()) {
exit(1);
}
if (ccl->startListener()) {
exit(1);
}
//Vold成為監聽線程
while(1) {
sleep(1000);
}
exit(0);
}
該方法的主要功能是創建下面4個對象並啟動
接下來分別說說幾個類:
[-> VolumeManager.cpp]
VolumeManager *VolumeManager::Instance() {
if (!sInstance)
sInstance = new VolumeManager();
return sInstance;
}
創建單例模式的VolumeManager對象
VolumeManager::VolumeManager() {
mDebug = false;
mActiveContainers = new AsecIdCollection();
mBroadcaster = NULL;
mUmsSharingCount = 0;
mSavedDirtyRatio = -1;
//當UMS獲取時,則設置dirty ratio為0
mUmsDirtyRatio = 0;
}
void setBroadcaster(SocketListener *sl) {
mBroadcaster = sl;
}
將新創建的CommandListener對象sl賦值給vm對象的成員變量mBroadcaster
int VolumeManager::start() {
//卸載所有設備,以提供最干淨的環境
unmountAll();
//創建Emulated內部存儲
mInternalEmulated = std::shared_ptr<android::vold::VolumeBase>(
new android::vold::EmulatedVolume("/data/media"));
mInternalEmulated->create();
return 0;
}
mInternalEmulated的據類型為EmulatedVolume,設備路徑為/data/media,id和label為“emulated”,mMountFlags=0。EmulatedVolume繼承於VolumeBase
int VolumeManager::unmountAll() {
std::lock_guard<std::mutex> lock(mLock);
//卸載內部存儲
if (mInternalEmulated != nullptr) {
mInternalEmulated->unmount();
}
//卸載外部存儲
for (auto disk : mDisks) {
disk->unmountAll();
}
FILE* fp = setmntent("/proc/mounts", "r");
if (fp == NULL) {
return -errno;
}
std::list<std::string> toUnmount;
mntent* mentry;
while ((mentry = getmntent(fp)) != NULL) {
if (strncmp(mentry->mnt_dir, "/mnt/", 5) == 0
|| strncmp(mentry->mnt_dir, "/storage/", 9) == 0) {
toUnmount.push_front(std::string(mentry->mnt_dir));
}
}
endmntent(fp);
for (auto path : toUnmount) {
//強制卸載
android::vold::ForceUnmount(path);
}
return 0;
}
此處打開的”/proc/mounts”每一行內容依次是文件名,目錄,類型,操作。例如:
/dev/fuse /mnt/runtime/default/emulated fuse rw,nosuid,nodev,...
該方法的主要工作是卸載:
卸載內部存儲:
status_t EmulatedVolume::doUnmount() {
if (mFusePid > 0) {
kill(mFusePid, SIGTERM);
TEMP_FAILURE_RETRY(waitpid(mFusePid, nullptr, 0));
mFusePid = 0;
}
KillProcessesUsingPath(getPath());
//強制卸載fuse路徑
ForceUnmount(mFuseDefault);
ForceUnmount(mFuseRead);
ForceUnmount(mFuseWrite);
rmdir(mFuseDefault.c_str());
rmdir(mFuseRead.c_str());
rmdir(mFuseWrite.c_str());
mFuseDefault.clear();
mFuseRead.clear();
mFuseWrite.clear();
return OK;
}
KillProcessesUsingPath的功能很強大,通過文件path來查看其所在進程,並殺掉相應進程。當以下5處任意一處存在與path相同的地方,則會殺掉相應的進程:
proc/<pid>/fd,打開文件;proc/<pid>/maps 打開文件映射;proc/<pid>/cwd 鏈接文件;proc/<pid>/root 鏈接文件;proc/<pid>/exe 鏈接文件;[-> VolumeBase.cpp]
status_t VolumeBase::create() {
mCreated = true;
status_t res = doCreate();
//通知VolumeCreated事件
notifyEvent(ResponseCode::VolumeCreated,
StringPrintf("%d \"%s\" \"%s\"", mType, mDiskId.c_str(), mPartGuid.c_str()));
//設置為非掛載狀態
setState(State::kUnmounted);
return res;
}
void VolumeBase::notifyEvent(int event, const std::string& value) {
if (mSilent) return;
//通過socket向MountService發送創建volume的命令(650)
VolumeManager::Instance()->getBroadcaster()->sendBroadcast(event,
StringPrintf("%s %s", getId().c_str(), value.c_str()).c_str(), false);
}
[-> system/vold/Main.cpp]
static int process_config(VolumeManager *vm) {
//獲取Fstab路徑
std::string path(android::vold::DefaultFstabPath());
fstab = fs_mgr_read_fstab(path.c_str());
...
bool has_adoptable = false;
for (int i = 0; i < fstab->num_entries; i++) {
if (fs_mgr_is_voldmanaged(&fstab->recs[i])) {
if (fs_mgr_is_nonremovable(&fstab->recs[i])) {
LOG(WARNING) << "nonremovable no longer supported; ignoring volume";
continue;
}
std::string sysPattern(fstab->recs[i].blk_device);
std::string nickname(fstab->recs[i].label);
int flags = 0;
if (fs_mgr_is_encryptable(&fstab->recs[i])) {
flags |= android::vold::Disk::Flags::kAdoptable;
has_adoptable = true;
}
if (fs_mgr_is_noemulatedsd(&fstab->recs[i])
|| property_get_bool("vold.debug.default_primary", false)) {
flags |= android::vold::Disk::Flags::kDefaultPrimary;
}
vm->addDiskSource(std::shared_ptr<VolumeManager::DiskSource>(
new VolumeManager::DiskSource(sysPattern, nickname, flags)));
}
}
property_set("vold.has_adoptable", has_adoptable ? "1" : "0");
return 0;
}
Fstab路徑:首先通過getprop ro.hardware,比如高通芯片則為qcom那麼Fstab路徑就是/fstab.qcom,那麼該文件的具體內容,例如(當然這個不同手機會有所不同):
[-> NetlinkManager.cpp]
NetlinkManager *NetlinkManager::Instance() {
if (!sInstance)
sInstance = new NetlinkManager();
return sInstance;
}
void setBroadcaster(SocketListener *sl) {
mBroadcaster = sl;
}
int NetlinkManager::start() {
struct sockaddr_nl nladdr;
int sz = 64 * 1024;
int on = 1;
memset(&nladdr, 0, sizeof(nladdr));
nladdr.nl_family = AF_NETLINK;
nladdr.nl_pid = getpid(); //記錄當前進程的pid
nladdr.nl_groups = 0xffffffff;
//創建event socket
if ((mSock = socket(PF_NETLINK, SOCK_DGRAM | SOCK_CLOEXEC,
NETLINK_KOBJECT_UEVENT)) < 0) {
return -1;
}
//設置uevent的SO_RCVBUFFORCE選項
if (setsockopt(mSock, SOL_SOCKET, SO_RCVBUFFORCE, &sz, sizeof(sz)) < 0) {
goto out;
}
//設置uevent的SO_PASSCRED選項
if (setsockopt(mSock, SOL_SOCKET, SO_PASSCRED, &on, sizeof(on)) < 0) {
goto out;
}
//綁定uevent socket
if (bind(mSock, (struct sockaddr *) &nladdr, sizeof(nladdr)) < 0) {
goto out;
}
//創建NetlinkHandler【見小節3.3.4】
mHandler = new NetlinkHandler(mSock);
//啟動NetlinkHandler【見小節3.3.5】
if (mHandler->start()) {
goto out;
}
return 0;
out:
close(mSock);
return -1;
}
NetlinkHandler繼承於NetlinkListener,NetlinkListener繼承於SocketListener。new NetlinkHandler(mSock)中參數mSock是用於與Kernel進行通信的socket對象。由於這個繼承關系,當NetlinkHandler初始化時會調用基類的初始化,最終調用到:
[-> SocketListener.cpp]
SocketListener::SocketListener(int socketFd, bool listen) {
//listen=false
init(NULL, socketFd, listen, false);
}
void SocketListener::init(const char *socketName, int socketFd, bool listen, bool useCmdNum) {
mListen = listen;
mSocketName = socketName;
//用於監聽Kernel發送過程的uevent事件
mSock = socketFd;
mUseCmdNum = useCmdNum;
//初始化同步鎖
pthread_mutex_init(&mClientsLock, NULL);
//創建socket通信的client端
mClients = new SocketClientCollection();
}
到此,mListen = false; mSocketName = NULL; mUseCmdNum = false。 另外,這裡用到的同步鎖,用於控制多線程並發訪問。 接著在來看看start過程:
[-> NetlinkHandler.cpp]
int NetlinkHandler::start() {
return this->startListener();
}
[-> SocketListener.cpp]
int SocketListener::startListener() {
return startListener(4);
}
int SocketListener::startListener(int backlog) {
...
//mListen =false
if (mListen && listen(mSock, backlog) < 0) {
return -1;
} else if (!mListen)
//創建SocketClient對象,並加入到mClients隊列
mClients->push_back(new SocketClient(mSock, false, mUseCmdNum));
//創建匿名管道
if (pipe(mCtrlPipe)) {
return -1;
}
//創建工作線程,線程運行函數threadStart【見小節3.3.6】
if (pthread_create(&mThread, NULL, SocketListener::threadStart, this)) {
return -1;
}
return 0;
}
mCtrlPipe是匿名管道,這是一個二元數組,mCtrlPipe[0]從管道讀數據,mCtrlPipe[1]從管道寫數據。
[-> SocketListener.cpp]
void *SocketListener::threadStart(void *obj) {
SocketListener *me = reinterpret_cast<SocketListener *>(obj);
//【見小節3.3.7】
me->runListener();
pthread_exit(NULL); //線程退出
return NULL;
}
[-> SocketListener.cpp]
void SocketListener::runListener() {
SocketClientCollection pendingList;
while(1) {
SocketClientCollection::iterator it;
fd_set read_fds;
int rc = 0;
int max = -1;
FD_ZERO(&read_fds);
if (mListen) {
max = mSock;
FD_SET(mSock, &read_fds);
}
FD_SET(mCtrlPipe[0], &read_fds);
if (mCtrlPipe[0] > max)
max = mCtrlPipe[0];
pthread_mutex_lock(&mClientsLock);
for (it = mClients->begin(); it != mClients->end(); ++it) {
// NB: calling out to an other object with mClientsLock held (safe)
int fd = (*it)->getSocket();
FD_SET(fd, &read_fds);
if (fd > max) {
max = fd;
}
}
pthread_mutex_unlock(&mClientsLock);
SLOGV("mListen=%d, max=%d, mSocketName=%s", mListen, max, mSocketName);
if ((rc = select(max + 1, &read_fds, NULL, NULL, NULL)) < 0) {
if (errno == EINTR)
continue;
SLOGE("select failed (%s) mListen=%d, max=%d", strerror(errno), mListen, max);
sleep(1);
continue;
} else if (!rc)
continue;
if (FD_ISSET(mCtrlPipe[0], &read_fds)) {
char c = CtrlPipe_Shutdown;
TEMP_FAILURE_RETRY(read(mCtrlPipe[0], &c, 1));
if (c == CtrlPipe_Shutdown) {
break;
}
continue;
}
if (mListen && FD_ISSET(mSock, &read_fds)) {
struct sockaddr addr;
socklen_t alen;
int c;
do {
alen = sizeof(addr);
c = accept(mSock, &addr, &alen);
SLOGV("%s got %d from accept", mSocketName, c);
} while (c < 0 && errno == EINTR);
if (c < 0) {
SLOGE("accept failed (%s)", strerror(errno));
sleep(1);
continue;
}
fcntl(c, F_SETFD, FD_CLOEXEC);
pthread_mutex_lock(&mClientsLock);
mClients->push_back(new SocketClient(c, true, mUseCmdNum));
pthread_mutex_unlock(&mClientsLock);
}
/* Add all active clients to the pending list first */
pendingList.clear();
pthread_mutex_lock(&mClientsLock);
for (it = mClients->begin(); it != mClients->end(); ++it) {
SocketClient* c = *it;
// NB: calling out to an other object with mClientsLock held (safe)
int fd = c->getSocket();
if (FD_ISSET(fd, &read_fds)) {
pendingList.push_back(c);
c->incRef();
}
}
pthread_mutex_unlock(&mClientsLock);
/* Process the pending list, since it is owned by the thread,
* there is no need to lock it */
while (!pendingList.empty()) {
/* Pop the first item from the list */
it = pendingList.begin();
SocketClient* c = *it;
pendingList.erase(it);
/* Process it, if false is returned, remove from list */
if (!onDataAvailable(c)) {
release(c, false);
}
c->decRef();
}
}
}
[-> CommandListener.cpp]
CommandListener::CommandListener() :
FrameworkListener("vold", true) {
registerCmd(new DumpCmd());
registerCmd(new VolumeCmd());
registerCmd(new AsecCmd());
registerCmd(new ObbCmd());
registerCmd(new StorageCmd());
registerCmd(new FstrimCmd());
}
[-> FrameworkListener.cpp]
FrameworkListener::FrameworkListener(const char *socketName, bool withSeq) :
SocketListener(socketName, true, withSeq) {
init(socketName, withSeq);
}
void FrameworkListener::init(const char *socketName UNUSED, bool withSeq) {
mCommands = new FrameworkCommandCollection();
errorRate = 0;
mCommandCount = 0;
mWithSeq = withSeq; //true
}
[-> SocketListener.cpp]
SocketListener::SocketListener(const char *socketName, bool listen, bool useCmdNum) {
init(socketName, -1, listen, useCmdNum);
}
void SocketListener::init(const char *socketName, int socketFd, bool listen, bool useCmdNum) {
mListen = listen; //true
mSocketName = socketName; //"vold"
mSock = socketFd; // -1
mUseCmdNum = useCmdNum; //true
pthread_mutex_init(&mClientsLock, NULL);
mClients = new SocketClientCollection();
}
socket名為“vold”
void FrameworkListener::registerCmd(FrameworkCommand *cmd) {
mCommands->push_back(cmd);
}
CommandListener::VolumeCmd::VolumeCmd() :
VoldCommand("volume") {
}
創建這些對象 DumpCmd,VolumeCmd,AsecCmd,ObbCmd,StorageCmd,FstrimCmd,並都加入到mCommands隊列。
int SocketListener::startListener() {
return startListener(4);
}
int SocketListener::startListener(int backlog) {
if (!mSocketName && mSock == -1) {
...
} else if (mSocketName) {
//獲取“vold”所對應的句柄
if ((mSock = android_get_control_socket(mSocketName)) < 0) {
return -1;
}
fcntl(mSock, F_SETFD, FD_CLOEXEC);
}
//CL開始監聽
if (mListen && listen(mSock, backlog) < 0) {
return -1;
}
...
//創建匿名管道
if (pipe(mCtrlPipe)) {
return -1;
}
//創建工作線程
if (pthread_create(&mThread, NULL, SocketListener::threadStart, this)) {
return -1;
}
return 0;
}
uevent向Vold的NetlinkManager發送Uevent事件;Uevent事件,再轉發給VolumeManager;socket通信方式發送給MountService;本文從源碼視角主要介紹了相關模塊的創建與啟動過程以及部分流程的介紹。要想更進一步了解,Android存儲系統之架構篇。
 Android ListView收縮與展開的封裝實現
Android ListView收縮與展開的封裝實現
常有這種需求,即ListView中數據較多(不涉及分頁),如果都展開,數據量較多,體驗不好,所以需要提供用戶查看更多、收縮數據的交互 截圖如下: 如圖所示,點擊
 談談我對Android安全機制的理解
談談我對Android安全機制的理解
本文從Android系統架構著手,分析Android的安全機制以SE Android,最後給出一些Android安全現狀和常見的安全解決方案。 1、Android
 如何更高效地使用 OkHttp
如何更高效地使用 OkHttp
原文鏈接: Effective OkHttp 原文作者 : Michael Parker 譯文出自 : 掘金翻譯計劃 譯者 : Brucezz 校對者: iT
 高效Android開發者必須知道的4個工具
高效Android開發者必須知道的4個工具
本文由碼農網 – 小峰原創翻譯,轉載請看清文末的轉載要求,歡迎參與我們的付費投稿計劃! 移動app開發是一個漫長而費力的過程。然而,現在的企業總是希望能夠