編輯:關於Android編程
Systemproperties類在android.os下,但這個類是隱藏的,上層程序開發無法直接使用,用Java的反射機制就可以了。
Java代碼中創建與修改android屬性用Systemproperties.set(name, value),獲取android屬性用Systemproperties.get(name),
Native代碼中通過property_get(const char *key, char *value, const char *default_value)/property_set(const char *name, const char *value)來讀取和設置屬性。需要注意的是android屬性的名稱是有一定的格式要求的,前綴必須用system\core\init\property_service.c中定義的前綴(後面會詳細列出),進行系統屬性設置的程序也必須有system或root權限,如何將android程序的權限提升到system權限呢?方法是這個樣子滴:
1、在AndroidManifest.xml中,加入android:sharedUserId="android.uid.system"。
2、在Android.mk中,設置LOCAL_CERTIFICATE := platform。
注意:使用property_get/property_set這兩個API必須要包含頭文件cutils/properties.h和鏈接libcutils庫。
Shell腳本中Android提供了命令行工具setprop和getprop來設置和獲取屬性。用法舉例:getprop sys.settingkeys.disabled,setprop sys.settingkeys.disabled 1
用法就講完了,怎麼樣,很簡單吧?下面我們具體來看一下讀取和設置系統屬性的流程:
讀取屬性:
native_get()[SystemProperties.java]
property_get()[android_os_SystemProperties.cpp]-->__system_property_read()[system_properties.c]
\bionic\libc\bionic\system_properties.c中:
int __system_property_get(const char *name, char *value)
{
//數據已經存儲在共享內存中,通過__system_property_area__ 即可獲取到,之後等待讀取完返回
const prop_info *pi = __system_property_find(name);
return __system_property_read(pi, 0, value);//阻塞式讀取
}
設置屬性(客戶端):
int __system_property_set(const char *key, const char *value)
{
msg.cmd = PROP_MSG_SETPROP;
strlcpy(msg.name, key, sizeof msg.name);
strlcpy(msg.value, value, sizeof msg.value);
err = send_prop_msg(&msg);
}
//發送消息通知property_service去啟動服務或者設置屬性
static int send_prop_msg(prop_msg *msg)
{
//與/dev/socket/property_service通信
s = socket(AF_LOCAL, SOCK_STREAM, 0);
connect(s, (struct sockaddr *) &addr, alen)
send(s, msg, sizeof(prop_msg), 0)
close(s);
}
可以看出讀取屬性比較簡單,就是通過__system_property_read直接讀取共享內存中的數據即可,而設置屬性則是通過客戶端發送socket消息讓property_service去啟動服務或者設置屬性。
int main(int argc, char **argv)
{
//加入到action queue隊列
queue_builtin_action(property_service_init_action, "property_service_init");
...
//將屬性系統初始化函數加入action queue
queue_builtin_action(property_init_action, "property_init");
...
for(;;)
//執行action queue隊列
//接收通過socket向property service發送的數據
nr = poll(ufds, fd_count, timeout);
……
handle_property_set_fd();
}
static int property_service_init_action(int nargs, char **args)
{
start_property_service();
}
void property_changed(const char *name, const char *value)
{
if (property_triggers_enabled) {
queue_property_triggers(name, value);
drain_action_queue();
}
}
\system\core\init\property_service.c:
void property_init(bool load_defaults)
{
//初始化共享內存空間
init_property_area();
//加載屬性文件
load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT);
}
\bionic\libc\bionic\system_properties.c
static int init_property_area(void)
{
//創建匿名內存空間PA_SIZE = 32768
init_workspace(&pa_workspace, PA_SIZE)
//將內存區域分成兩部分:屬性系統基本信息和屬性鍵值對
pa_info_array = (void*) (((char*) pa_workspace.data) + PA_INFO_START);
//初始化屬性系統信息
pa = pa_workspace.data;
memset(pa, 0, PA_SIZE);
pa->magic = PROP_AREA_MAGIC;
pa->version = PROP_AREA_VERSION;
/* plug into the lib property services 每個進程都會使用此變量,指向系統屬性共享內存區域,訪問系統屬性,很重要*/
__system_property_area__ = pa;
}
static int init_workspace(workspace *w, size_t size)
{
//dev is a tmpfs是一種虛擬內存文件系統
int fd = open("/dev/__properties__", O_RDWR | O_CREAT, 0600);
//將文件映射為共享進程空間內存 使其可以與操作內存方式一致
void *data = mmap(NULL, size, PROT_READ | PROT_WRITE,
MAP_SHARED, fd, 0);
close(fd);
//刪除文件
fd = open("/dev/__properties__", O_RDONLY);
unlink("/dev/__properties__");
//保存fd size 將作為環境變量傳遞給每個進程
w->data = data; w->size = size; w->fd = fd;
}
static void load_properties_from_file(const char *fn)
{
//讀取系統屬性鍵值對數據寫入到共享內存中
data = read_file(fn, &sz);
load_properties(data);
}
void start_property_service(void)
{
//加載屬性配置文件,加載的屬性將覆蓋原先的值。這些屬性加載之後,最後加載的屬性會被保持在/data/property中。
load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
load_properties_from_file(PROP_PATH_LOCAL_OVERRIDE);
load_persistent_properties();
//創建socket資源 並綁定
fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
//監聽
listen(fd, 8);
}
void handle_property_set_fd()
{
//等待建立通信
s = accept(property_set_fd, (struct sockaddr *) &addr, &addr_size);
//獲取套接字相關信息 uid gid
getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size);
//接收屬性設置請求消息
recv(s, &msg, sizeof(msg), 0);
//處理消息
switch(msg.cmd) {
case PROP_MSG_SETPROP:
//通過設置系統屬性 處理ctl.開頭消息
if(memcmp(msg.name,"ctl.",4) == 0)
{
//權限檢測
if (check_control_perms(msg.value, cr.uid, cr.gid))
{
handle_control_message((char*) msg.name + 4, (char*) msg.value);
}
} else
{
//更改系統屬性值
if (check_perms(msg.name, cr.uid, cr.gid))
{
property_set((char*) msg.name, (char*) msg.value);
}
}
break;
}
close(s);
}
void handle_control_message(const char *msg, const char *arg)
{
if (!strcmp(msg,"start")) {
msg_start(arg);
} else if (!strcmp(msg,"stop")) {
msg_stop(arg);
} else if (!strcmp(msg,"restart")) {
msg_stop(arg);
msg_start(arg);
}
}
static void msg_start(const char *name)
{
service_start(svc, args);
}
void service_start(struct service *svc, const char *dynamic_args)
{
//創建進程
pid = fork();
if (pid == 0) {
if (properties_inited()) {
//獲取系統屬性空間文件描述
get_property_workspace(&fd, &sz);
//dup最小的可用文件描述符
sprintf(tmp, "%d,%d", dup(fd), sz);
//加入ANDROID_PROPERTY_WORKSPACE環境變量到ENV
//包含共享內存fd
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
}
//執行程序 傳遞環境變量ENV
execve(svc->args[0], (char**) svc->args, (char**) ENV)
//設置Service系統屬性
notify_service_state(svc->name, "running");
}
}
void get_property_workspace(int *fd, int *sz)
{
*fd = pa_workspace.fd;
*sz = pa_workspace.size;
}
在bionic\libc\bionic\libc_init_dynamic.c中:
//將系統屬性內存空間映射到當前進程虛擬空間,進程在啟動時,會加載動態庫bionic libc庫:
void __attribute__((constructor)) __libc_preinit(void);
void __libc_preinit(void)
{
__libc_init_common(elfdata);
}
void __libc_init_common(uintptr_t *elfdata)
{
__system_properties_init();
}
int __system_properties_init(void)
{
prop_area *pa; int s, fd; unsigned sz; char *env;
//獲取環境變量ANDROID_PROPERTY_WORKSPACE
//與上面init進程中設置對應
env = getenv("ANDROID_PROPERTY_WORKSPACE");
//共享內存文件描述符 內存大小
fd = atoi(env);
sz = atoi(env + 1);
//將文件描述符映射到當前進程虛擬空間內存,實現共享內存
pa = mmap(0, sz, PROT_READ, MAP_SHARED, fd, 0);
//全局變量指向共享系統屬性內存首地址
__system_property_area__ = pa;
}
static int check_perms(const char *name, unsigned int uid, unsigned int gid)
{
//進行權限檢測
for (i = 0; property_perms[i].prefix; i++) {
int tmp;
if (strncmp(property_perms[i].prefix, name,
strlen(property_perms[i].prefix)) == 0) {
if ((uid && property_perms[i].uid == uid) ||
(gid && property_perms[i].gid == gid)) {
return 1;
}
}
}
return 0;
}
property_perms[] = {
{ "net.rmnet0.", AID_RADIO, 0 },
{ "net.gprs.", AID_RADIO, 0 },
{ "net.ppp", AID_RADIO, 0 },
{ "ril.", AID_RADIO, 0 },
{ "gsm.", AID_RADIO, 0 },
{ "persist.radio", AID_RADIO, 0 },
{ "net.dns", AID_RADIO, 0 },
{ "net.", AID_SYSTEM, 0 },
{ "dev.", AID_SYSTEM, 0 },
{ "runtime.", AID_SYSTEM, 0 },
{ "hw.", AID_SYSTEM, 0 },
{ "sys.", AID_SYSTEM, 0 },
{ "service.", AID_SYSTEM, 0 },
{ "wlan.", AID_SYSTEM, 0 },
{ "dhcp.", AID_SYSTEM, 0 },
{ "dhcp.", AID_DHCP, 0 },
{ "vpn.", AID_SYSTEM, 0 },
{ "vpn.", AID_VPN, 0 },
{ "debug.", AID_SHELL, 0 },
{ "log.", AID_SHELL, 0 },
{ "service.adb.root", AID_SHELL, 0 },
{ "persist.sys.", AID_SYSTEM, 0 },
{ "persist.service.", AID_SYSTEM, 0 },
{ "persist.security.", AID_SYSTEM, 0 },
{ NULL, 0, 0 }
};
int property_set(const char *name, const char *value)
{
property_changed(name, value);
return 0;
}
以上使用到的相關的宏定義在這裡:#define PROP_SERVICE_NAME "property_service" #define PROP_PATH_RAMDISK_DEFAULT "/default.prop" #define PROP_PATH_SYSTEM_BUILD "/system/build.prop" #define PROP_PATH_SYSTEM_DEFAULT "/system/default.prop" #define PROP_PATH_LOCAL_OVERRIDE "/data/local.prop"
還有這裡 system/core/include/private/android_filesystem_config.h
#define AID_SYSTEM 1000 /* system server */ #define AID_RADIO 1001 /* telephony subsystem, RIL */ #define AID_DHCP 1014 /* dhcp client */ #define AID_VPN 1016 /* vpn system */ #define AID_SHELL 2000 /* adb and debug shell user */
代碼有點長,具體來解釋下這段代碼都做了神馬~
Init main()
1、property_init
初始化共享內存空間,即:將文件(/dev/__properties__)映射為共享進程空間內存,使其可以與操作內存方式一致,將__system_property_area__指向系統屬性共享內存區域,每個進程都會使用此變量。
加載屬性配置文件(/default.prop),並寫入到共享內存中。
2、start_property_service
加載屬性配置文件,加載的屬性將覆蓋原先的值,這些屬性加載之後,最後加載的屬性會被保持在/data/property中,還會寫到共享內存中。
順序是:
/system/build.prop
/system/default.prop
/data/local.prop
接著創建socket property_service,並且監聽客戶端的消息。
3、handle_property_set_fd
main()裡面有個死循環,不停的去取出消息,然後使用handle_property_set_fd處理,該函數做的事情是:如果接收到PROP_MSG_SETPROP消息,
如果是以ctl.開頭消息,那麼就是用來啟動和關閉service的,關閉/啟動服務是在新的進程中進行的,會把共享內存的fd加入到環境變量中。
例如:
// start boot animation
property_set("ctl.start", "bootanim");
當然在init.rc中表明服務是否在開機時啟動也是可以的,如:
service adbd /sbin/adbd
class core
disabled //不自動啟動
如果不是以ctl.開頭的消息,那就是設置系統屬性值了。
為了方便理解,上一張圖片:
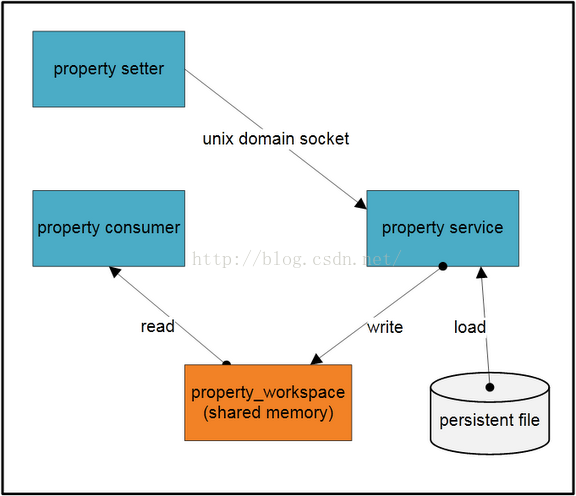
(圖片來自網絡)
從圖中我們可以看出Android屬性系統由有三個進程,一組屬性文件和一塊共享內存組成。這塊共享內存保存著系統中所有的屬性記錄,只有Property service能寫這塊共享內存,並且Property service負責將屬性文件中的屬性記錄加載到共享內存中。
屬性讀取進程(property consumer)把這塊共享內存映射到自己的進程空間,然後直接讀取它。
屬性設置進程(property setter)也加載這塊共享到他的進程空間,但是他不能直接寫這塊共享內存。當他需要增加或者修改屬性的時候,通過Unix Socket發生屬性給Property service,Property service將代表設置進程寫入共享內存和屬性文件。
Property service運行於init進程中。init進程首先創建一塊共享內存,並把他的句柄fd存放在這塊內存中,init進程通過mmap帶MAP_SHARE標志的系統調用,把這塊內存映射到他的虛擬空間中,最終這塊內存所有的更新將會被所有映射這塊共享內存的進程看到。共享內存句柄fd和共享內存大小存儲在系統環境變量“ANDROID_PROPERTY_WORKSPACE”中,所有的進程包括屬性設置進程和屬性讀取進程都將通過這個系統環境變量獲得共享內存的句柄fd和大小,然後把這塊內存映射到他們自己的虛擬空間。然後,init進程將會從以下文件中加載屬性:
/default.prop
/system/build.prop
/system/default.prop
/data/local.prop
下一步是啟動Property service。這步中,將會創建一個Unix Socket服務器,這個Socket有一個聞名的名稱“/dev/socket/property_service”。最後init進入死循環,等待socket的連接請求。
在讀取進程中,當它初始化libc庫的時候,將會獲得屬性系統共享內存的句柄和大小(bionic/libc/bionic/libc_init_common.c __libc_init_common函數)。並把這塊共享內存映射到自己的進程虛擬空間中(bionic/libc/bionic/system_properties.c __system_properties_init函數)。這樣讀取進程將會向訪問普通內存一樣訪問屬性系統的共享內存了。
最後,來一個擴展:
如果屬性名稱以“ro.”開頭,那麼這個屬性被視為只讀屬性。一旦設置,屬性值不能改變。
如果屬性名稱以“persist.”開頭,當設置這個屬性時,其值也將寫入/data/property 。
如果屬性名稱以“net.”開頭,當設置這個屬性時,“net.change”屬性將會自動設置,以加入到最後修改的屬性名。(這是很巧妙的。 netresolve模塊的使用這個屬性來追蹤在net.*屬性上的任何變化。)
屬性“ ctrl.start ”和“ ctrl.stop ”是用來啟動和停止服務。
 詳解Android權限管理之Android 6.0運行時權限及解決辦法
詳解Android權限管理之Android 6.0運行時權限及解決辦法
前言:今天還是圍繞著最近面試的一個熱門話題Android 6.0權限適配來總結學習,其實Android 6.0權限適配我們公司是在今年5月份才開始做,算是比較晚的吧,不過
 Android響應式編程(一)RxJava前篇[入門基礎]
Android響應式編程(一)RxJava前篇[入門基礎]
1.RxJava概述ReactiveX與RxJava在講到RxJava之前我們首先要了解什麼是ReactiveX,因為RxJava是ReactiveX的一種java實現。
 Android DrawerLayout 抽屜
Android DrawerLayout 抽屜
Android DrawerLayout 抽屜DrawerLayout 在supportV4 Lib中,類似開源slidemenu一樣,DrawerLayout父類為Vi
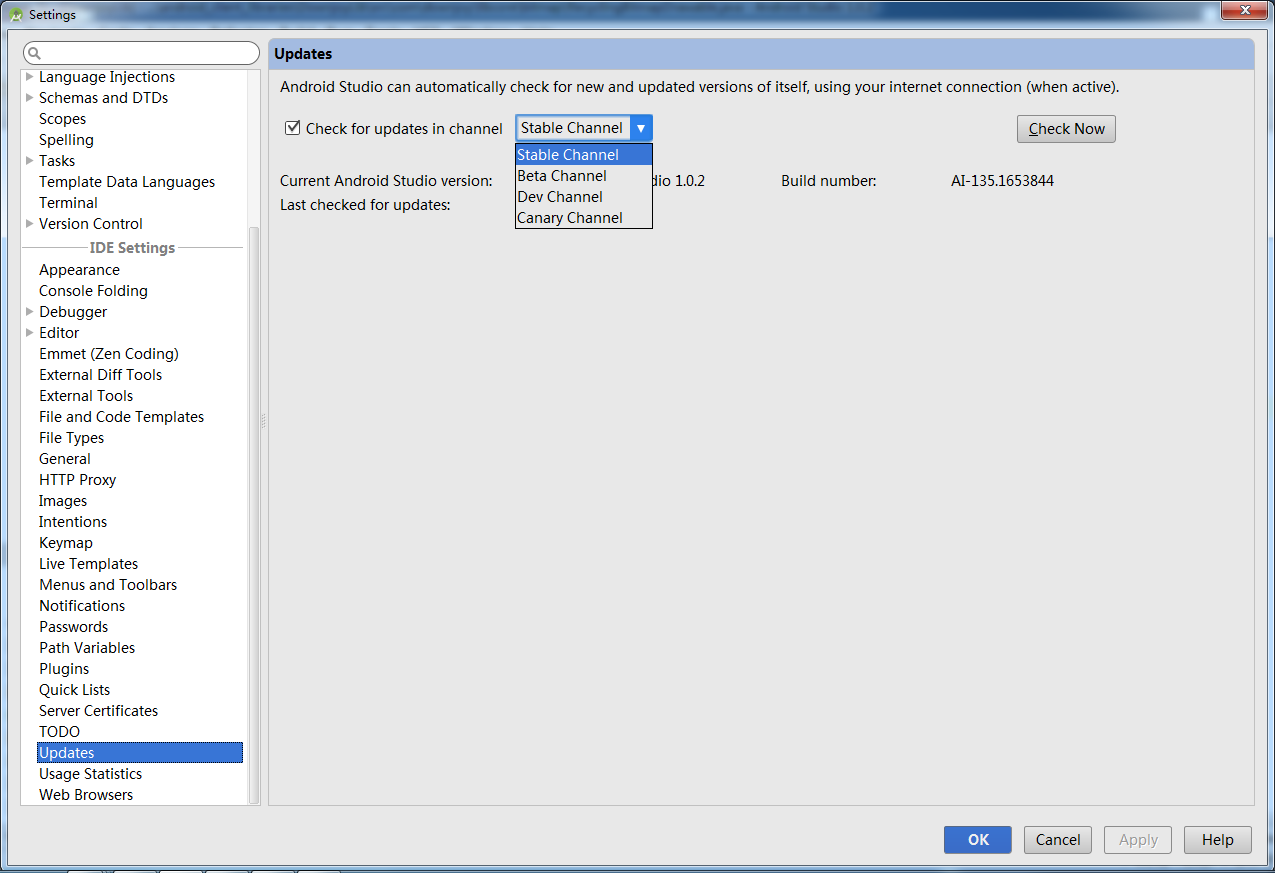 clipse項目遷移到android studio的方法(圖文最新版)
clipse項目遷移到android studio的方法(圖文最新版)
前言最近Android studio(下文簡稱AS)官方發布了正式版,目前火得不行。個人認為主要是因為android是google自家的產品,AS也是他自己搞的IDE,以