編輯:關於Android編程
羅升陽的《Android系統源代碼情景分析》一書,有關log是如何顯示,那麼真的在代碼中是如何實現的呢?就該問題我想需要細細分析
在firmware中的log是如何產生的,我沒有看過firmware的code,不清楚它是如何實現的,這是我的短板,回頭得補上!在這裡先分析lk中是如何實現的。
相信在源碼中看到bootable\bootloader\lk下的app\aboot.c中最常用於打log信息的語句為dprintf。那麼它的原型在哪裡?
其原型非常好找,在lk\include\debug.h中就有定義。
/* debug levels */
#define CRITICAL 0
#define ALWAYS 0
#define INFO 1
#define SPEW 2
/* output */
void _dputc(char c); // XXX for now, platform implements
int _dputs(const char *str);
int _dprintf(const char *fmt, ...) __PRINTFLIKE(1, 2);
int _dvprintf(const char *fmt, va_list ap);
#define dputc(level, str) do { if ((level) <= DEBUGLEVEL) { _dputc(str); } } while (0)
#define dputs(level, str) do { if ((level) <= DEBUGLEVEL) { _dputs(str); } } while (0)
#define dprintf(level, x...) do { if ((level) <= DEBUGLEVEL) { _dprintf(x); } } while (0)
#define dvprintf(level, x...) do { if ((level) <= DEBUGLEVEL) { _dvprintf(x); } } while (0)
宏定義dprintf(level, x…)讓我們可以看到其實際調用的還是 _dprintf(x),然後我們去定位到lk\platform\msm_share\debug.c
int _dprintf(const char *fmt, ...)
{
char buf[256];
char ts_buf[13];
int err;
snprintf(ts_buf, sizeof(ts_buf), "[%u] ",(unsigned int)current_time());
dputs(ALWAYS, ts_buf);
va_list ap;
va_start(ap, fmt);
err = vsnprintf(buf, sizeof(buf), fmt, ap);
va_end(ap);
dputs(ALWAYS, buf);
return err;
}
因而不難看出它最後是將buf組成後扔給dputs。看前面有宏定義dputs
int _dputs(const char *str)
{
while(*str != 0) {
_dputc(*str++);
}
return 0;
}
//
void _dputc(char c)
{
#if WITH_DEBUG_LOG_BUF
log_putc(c);
#endif
#if WITH_DEBUG_DCC
if (c == '\n') {
write_dcc('\r');
}
write_dcc(c) ;
#endif
#if WITH_DEBUG_UART
uart_putc(0, c);
#endif
#if WITH_DEBUG_FBCON && WITH_DEV_FBCON
fbcon_putc(c);
#endif
#if WITH_DEBUG_JTAG
jtag_dputc(c);
#endif
}
在這裡,我表示追捕不到WITH_DEBUG_UART的宏是如何定義的,如果有知道的朋友,歡迎留言幫我解決這個問題。
我猜想應該是使用WITH_DEBUG_UART這個宏
這樣我們可以去找到uart_putc的實現方法,然後逐層分析。可以定位到lk\platform\msm_share\uart_dm.c
/* UART_DM uses four character word FIFO where as UART core
* uses a character FIFO. so it's really inefficient to try
* to write single character. But that's how dprintf has been
* implemented.
*/
int uart_putc(int port, char c)
{
uint32_t uart_base = port_lookup[port];
/* Don't do anything if UART is not initialized */
if (!uart_init_flag)
return -1;
msm_boot_uart_dm_write(uart_base, &c, 1);
return 0;
}
msm_boot_uart_dm_write(uint32_t base, char *data, unsigned int num_of_chars)
{
unsigned int tx_word_count = 0;
unsigned int tx_char_left = 0, tx_char = 0;
unsigned int tx_word = 0;
int i = 0;
char *tx_data = NULL;
uint8_t num_chars_written;
if ((data == NULL) || (num_of_chars <= 0)) {
return MSM_BOOT_UART_DM_E_INVAL;
}
msm_boot_uart_calculate_num_chars_to_write(data, &num_of_chars);
tx_data = data;
/* Write to NO_CHARS_FOR_TX register number of characters
* to be transmitted. However, before writing TX_FIFO must
* be empty as indicated by TX_READY interrupt in IMR register
*/
/* Check if transmit FIFO is empty.
* If not we'll wait for TX_READY interrupt. */
if (!(readl(MSM_BOOT_UART_DM_SR(base)) & MSM_BOOT_UART_DM_SR_TXEMT)) {
while (!(readl(MSM_BOOT_UART_DM_ISR(base)) & MSM_BOOT_UART_DM_TX_READY)) {
udelay(1);
/* Kick watchdog? */
}
}
//We need to make sure the DM_NO_CHARS_FOR_TX&DM_TF are are programmed atmoically.
enter_critical_section();
/* We are here. FIFO is ready to be written. */
/* Write number of characters to be written */
writel(num_of_chars, MSM_BOOT_UART_DM_NO_CHARS_FOR_TX(base));
/* Clear TX_READY interrupt */
writel(MSM_BOOT_UART_DM_GCMD_RES_TX_RDY_INT, MSM_BOOT_UART_DM_CR(base));
/* We use four-character word FIFO. So we need to divide data into
* four characters and write in UART_DM_TF register */
tx_word_count = (num_of_chars % 4) ? ((num_of_chars / 4) + 1) :
(num_of_chars / 4);
tx_char_left = num_of_chars;
for (i = 0; i < (int)tx_word_count; i++) {
tx_char = (tx_char_left < 4) ? tx_char_left : 4;
num_chars_written = pack_chars_into_words((uint8_t *)tx_data, tx_char, &tx_word);
/* Wait till TX FIFO has space */
while (!(readl(MSM_BOOT_UART_DM_SR(base)) & MSM_BOOT_UART_DM_SR_TXRDY)) {
udelay(1);
}
/* TX FIFO has space. Write the chars */
writel(tx_word, MSM_BOOT_UART_DM_TF(base, 0));
tx_char_left = num_of_chars - (i + 1) * 4;
tx_data = tx_data + num_chars_written;
}
exit_critical_section();
return MSM_BOOT_UART_DM_E_SUCCESS;
}
在這裡的code明顯看出是否初始化uart成功,然後調用msm_boot_uart_dm_write函數,驗證輸入字符,檢查fifo隊列是否已經清空數據,重置tx中斷,寫入相關的寄存器,等等,在這裡我不詳細解釋了,可以慢慢看code,細細體會其中神奇的地方。
//驗證輸入字符自動加\n
/*
* Helper function to keep track of Line Feed char "\n" with
* Carriage Return "\r\n".
*/
static unsigned int
msm_boot_uart_calculate_num_chars_to_write(char *data_in,
uint32_t *num_of_chars)
{
uint32_t i = 0, j = 0;
if ((data_in == NULL)) {
return MSM_BOOT_UART_DM_E_INVAL;
}
for (i = 0, j = 0; i < *num_of_chars; i++, j++) {
if (data_in[i] == '\n') {
j++;
}
}
*num_of_chars = j;
return MSM_BOOT_UART_DM_E_SUCCESS;
}
其實在這裡我們僅僅只是對發送log做了解析。對於我們在終端可以向機台發送命令,其機制也有,其基本與發送的機制一樣。
/* UART_DM uses four character word FIFO whereas uart_getc
* is supposed to read only one character. So we need to
* read a word and keep track of each character in the word.
*/
int uart_getc(int port, bool wait)
{
int byte;
static unsigned int word = 0;
uint32_t uart_base = port_lookup[port];
/* Don't do anything if UART is not initialized */
if (!uart_init_flag)
return -1;
if (!word) {
/* Read from FIFO only if it's a first read or all the four
* characters out of a word have been read */
if (msm_boot_uart_dm_read(uart_base, &word, wait) != MSM_BOOT_UART_DM_E_SUCCESS) {
return -1;
}
}
byte = (int)word & 0xff;
word = word >> 8;
return byte;
}
/*
* UART Receive operation
* Reads a word from the RX FIFO.
*/
static unsigned int
msm_boot_uart_dm_read(uint32_t base, unsigned int *data, int wait)
{
static int rx_last_snap_count = 0;
static int rx_chars_read_since_last_xfer = 0;
if (data == NULL) {
return MSM_BOOT_UART_DM_E_INVAL;
}
/* We will be polling RXRDY status bit */
while (!(readl(MSM_BOOT_UART_DM_SR(base)) & MSM_BOOT_UART_DM_SR_RXRDY)) {
/* if this is not a blocking call, we'll just return */
if (!wait) {
return MSM_BOOT_UART_DM_E_RX_NOT_READY;
}
}
/* Check for Overrun error. We'll just reset Error Status */
if (readl(MSM_BOOT_UART_DM_SR(base)) & MSM_BOOT_UART_DM_SR_UART_OVERRUN) {
writel(MSM_BOOT_UART_DM_CMD_RESET_ERR_STAT, MSM_BOOT_UART_DM_CR(base));
}
/* RX FIFO is ready; read a word. */
*data = readl(MSM_BOOT_UART_DM_RF(base, 0));
/* increment the total count of chars we've read so far */
rx_chars_read_since_last_xfer += 4;
/* Rx transfer ends when one of the conditions is met:
* - The number of characters received since the end of the previous
* xfer equals the value written to DMRX at Transfer Initialization
* - A stale event occurred
*/
/* If RX transfer has not ended yet */
if (rx_last_snap_count == 0) {
/* Check if we've received stale event */
if (readl(MSM_BOOT_UART_DM_MISR(base)) & MSM_BOOT_UART_DM_RXSTALE) {
/* Send command to reset stale interrupt */
writel(MSM_BOOT_UART_DM_CMD_RES_STALE_INT, MSM_BOOT_UART_DM_CR(base));
}
/* Check if we haven't read more than DMRX value */
else if ((unsigned int)rx_chars_read_since_last_xfer <
readl(MSM_BOOT_UART_DM_DMRX(base))) {
/* We can still continue reading before initializing RX transfer */
return MSM_BOOT_UART_DM_E_SUCCESS;
}
/* If we've reached here it means RX
* xfer end conditions been met
*/
/* Read UART_DM_RX_TOTAL_SNAP register
* to know how many valid chars
* we've read so far since last transfer
*/
rx_last_snap_count = readl(MSM_BOOT_UART_DM_RX_TOTAL_SNAP(base));
}
/* If there are still data left in FIFO we'll read them before
* initializing RX Transfer again */
if ((rx_last_snap_count - rx_chars_read_since_last_xfer) >= 0) {
return MSM_BOOT_UART_DM_E_SUCCESS;
}
msm_boot_uart_dm_init_rx_transfer(base);
rx_last_snap_count = 0;
rx_chars_read_since_last_xfer = 0;
return MSM_BOOT_UART_DM_E_SUCCESS;
}
還記得有一文中有講到如何進行lk的啟動的,在kmain(void)函數中會調用target_early_init()此時就是對uart的寄存器做了初始化。
void target_early_init(void)
{
#if WITH_DEBUG_UART
uart_dm_init(1, 0, BLSP1_UART0_BASE);
#endif
}
而uart_dm_init函數就是對uart的初始化動作
/* Defining functions that's exposed to outside world and in coformance to
* existing uart implemention. These functions are being called to initialize
* UART and print debug messages in bootloader.
*/
void uart_dm_init(uint8_t id, uint32_t gsbi_base, uint32_t uart_dm_base)
{
static uint8_t port = 0;
char *data = "Android Bootloader - UART_DM Initialized!!!\n";
/* Configure the uart clock */
clock_config_uart_dm(id);
dsb();
/* Configure GPIO to provide connectivity between UART block
product ports and chip pads */
gpio_config_uart_dm(id);
dsb();
/* Configure GSBI for UART_DM protocol.
* I2C on 2 ports, UART (without HS flow control) on the other 2.
* This is only on chips that have GSBI block
*/
if(gsbi_base)
writel(GSBI_PROTOCOL_CODE_I2C_UART <<
GSBI_CTRL_REG_PROTOCOL_CODE_S,
GSBI_CTRL_REG(gsbi_base));
dsb();
/* Configure clock selection register for tx and rx rates.
* Selecting 115.2k for both RX and TX.
*/
writel(UART_DM_CLK_RX_TX_BIT_RATE, MSM_BOOT_UART_DM_CSR(uart_dm_base));
dsb();
/* Intialize UART_DM */
msm_boot_uart_dm_init(uart_dm_base);
msm_boot_uart_dm_write(uart_dm_base, data, 44);
ASSERT(port < ARRAY_SIZE(port_lookup));
port_lookup[port++] = uart_dm_base;
/* Set UART init flag */
uart_init_flag = 1;
}
因而我們可以看到uart初始化時鐘後,設定gpio,設置頻率,設置寄存器,設置flag。
/* Configure UART clock based on the UART block id*/
void clock_config_uart_dm(uint8_t id)
{
int ret;
char iclk[64];
char cclk[64];
snprintf(iclk, sizeof(iclk), "uart%u_iface_clk", id);
snprintf(cclk, sizeof(cclk), "uart%u_core_clk", id);
ret = clk_get_set_enable(iclk, 0, 1);
if(ret)
{
dprintf(CRITICAL, "failed to set %s ret = %d\n", iclk, ret);
ASSERT(0);
}
ret = clk_get_set_enable(cclk, 7372800, 1);
if(ret)
{
dprintf(CRITICAL, "failed to set %s ret = %d\n", cclk, ret);
ASSERT(0);
}
}
/* Configure gpio for blsp uart 2 */
void gpio_config_uart_dm(uint8_t id)
{
/* configure rx gpio */
gpio_tlmm_config(5, 2, GPIO_INPUT, GPIO_NO_PULL,
GPIO_8MA, GPIO_DISABLE);
/* configure tx gpio */
gpio_tlmm_config(4, 2, GPIO_OUTPUT, GPIO_NO_PULL,
GPIO_8MA, GPIO_DISABLE);
}
/*
* Initialize UART_DM - configure clock and required registers.
*/
static unsigned int msm_boot_uart_dm_init(uint32_t uart_dm_base)
{
/* Configure UART mode registers MR1 and MR2 */
/* Hardware flow control isn't supported */
writel(0x0, MSM_BOOT_UART_DM_MR1(uart_dm_base));
/* 8-N-1 configuration: 8 data bits - No parity - 1 stop bit */
writel(MSM_BOOT_UART_DM_8_N_1_MODE, MSM_BOOT_UART_DM_MR2(uart_dm_base));
/* Configure Interrupt Mask register IMR */
writel(MSM_BOOT_UART_DM_IMR_ENABLED, MSM_BOOT_UART_DM_IMR(uart_dm_base));
/* Configure Tx and Rx watermarks configuration registers */
/* TX watermark value is set to 0 - interrupt is generated when
* FIFO level is less than or equal to 0 */
writel(MSM_BOOT_UART_DM_TFW_VALUE, MSM_BOOT_UART_DM_TFWR(uart_dm_base));
/* RX watermark value */
writel(MSM_BOOT_UART_DM_RFW_VALUE, MSM_BOOT_UART_DM_RFWR(uart_dm_base));
/* Configure Interrupt Programming Register */
/* Set initial Stale timeout value */
writel(MSM_BOOT_UART_DM_STALE_TIMEOUT_LSB, MSM_BOOT_UART_DM_IPR(uart_dm_base));
/* Configure IRDA if required */
/* Disabling IRDA mode */
writel(0x0, MSM_BOOT_UART_DM_IRDA(uart_dm_base));
/* Configure and enable sim interface if required */
/* Configure hunt character value in HCR register */
/* Keep it in reset state */
writel(0x0, MSM_BOOT_UART_DM_HCR(uart_dm_base));
/* Configure Rx FIFO base address */
/* Both TX/RX shares same SRAM and default is half-n-half.
* Sticking with default value now.
* As such RAM size is (2^RAM_ADDR_WIDTH, 32-bit entries).
* We have found RAM_ADDR_WIDTH = 0x7f */
/* Issue soft reset command */
msm_boot_uart_dm_reset(uart_dm_base);
/* Enable/Disable Rx/Tx DM interfaces */
/* Data Mover not currently utilized. */
writel(0x0, MSM_BOOT_UART_DM_DMEN(uart_dm_base));
/* Enable transmitter and receiver */
writel(MSM_BOOT_UART_DM_CR_RX_ENABLE, MSM_BOOT_UART_DM_CR(uart_dm_base));
writel(MSM_BOOT_UART_DM_CR_TX_ENABLE, MSM_BOOT_UART_DM_CR(uart_dm_base));
/* Initialize Receive Path */
msm_boot_uart_dm_init_rx_transfer(uart_dm_base);
return MSM_BOOT_UART_DM_E_SUCCESS;
}
那麼從code中我們看到了它的設置,那麼為何它是這樣設置的?那麼就要看電路圖了!


 vc/G5rnWtcTKx86qyrLDtKOsYXVkaW9kZWJ1Z7XEcGluysfI57rO0rK+zcrHZ3Bpbzg3ysfI57rOuaTX96Os1eK49s7Su+HOysHLRUW1xM2sysK686Os1NnX9r3itPChozwvcD4NCjxwPtbBtMujrGJvb3Rsb2FkZXKy47XEdWFydMrHyOe6zr2owaK1xKOs0tG+rdPQwcu63LrDtcS94srNo6y2+NTadGFyZ2V0X2luaXQoKbqvyv3U2cilyejWw9K7sd9ncGlvztK49sjLvvW1w8rHw7vT0LHY0qq1xKOhPC9wPg0KPGgyIGlkPQ=="後記">後記
vc/G5rnWtcTKx86qyrLDtKOsYXVkaW9kZWJ1Z7XEcGluysfI57rO0rK+zcrHZ3Bpbzg3ysfI57rOuaTX96Os1eK49s7Su+HOysHLRUW1xM2sysK686Os1NnX9r3itPChozwvcD4NCjxwPtbBtMujrGJvb3Rsb2FkZXKy47XEdWFydMrHyOe6zr2owaK1xKOs0tG+rdPQwcu63LrDtcS94srNo6y2+NTadGFyZ2V0X2luaXQoKbqvyv3U2cilyejWw9K7sd9ncGlvztK49sjLvvW1w8rHw7vT0LHY0qq1xKOhPC9wPg0KPGgyIGlkPQ=="後記">後記
system/core層logcat分析
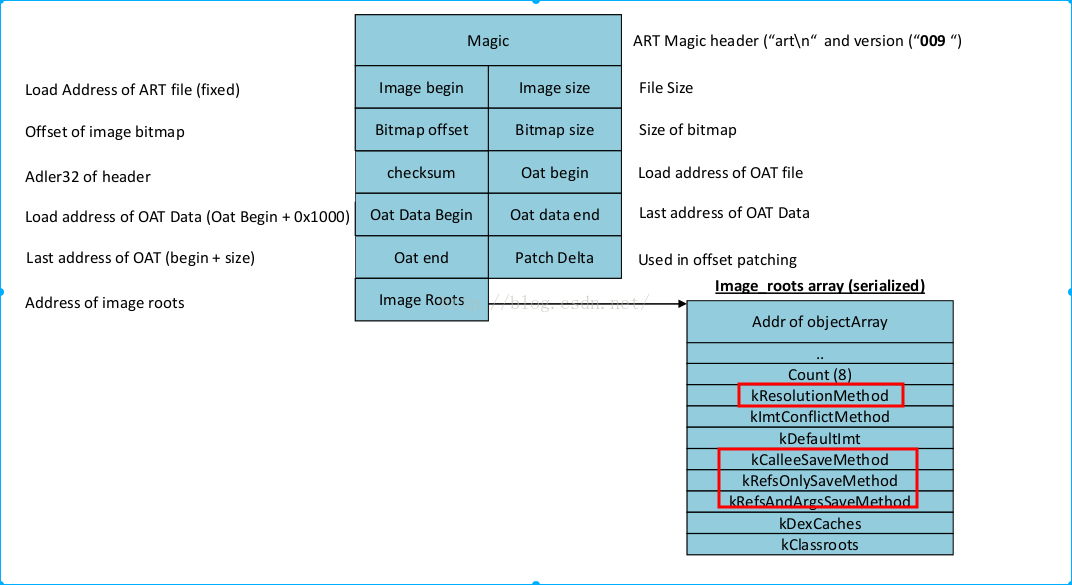
在這裡我們清晰的看到了《Android系統源代碼情景分析》一書中提到的基礎數據結構體。具體路徑在/system/core/include/log/logger.h
/*
* The userspace structure for version 1 of the logger_entry ABI.
* This structure is returned to userspace by the kernel logger
* driver unless an upgrade to a newer ABI version is requested.
*/
struct logger_entry {
uint16_t len; /* length of the payload */
uint16_t __pad; /* no matter what, we get 2 bytes of padding */
int32_t pid; /* generating process's pid */
int32_t tid; /* generating process's tid */
int32_t sec; /* seconds since Epoch */
int32_t nsec; /* nanoseconds */
char msg[0]; /* the entry's payload */
} __attribute__((__packed__));
/*
* The maximum size of the log entry payload that can be
* written to the logger. An attempt to write more than
* this amount will result in a truncated log entry.
*/
#define LOGGER_ENTRY_MAX_PAYLOAD 4076
/*
* The maximum size of a log entry which can be read from the
* kernel logger driver. An attempt to read less than this amount
* may result in read() returning EINVAL.
*/
#define LOGGER_ENTRY_MAX_LEN (5*1024)
但是我越看越覺得不一樣,看來androidM的log機制已經發生了變化,於是我覺得有書不如無書,帶著這樣的想法我又細細讀了一遍。
決定再從init,kernel,framwork層分層去做解析,當然重點還是在kernel層。
 Android多級樹形列表控件
Android多級樹形列表控件
我們開發app過程中,經常會碰到需要 多級列表展示的效果。而Android原生sdk中根本沒有3級 4級甚至更多級別的列表控件。所以我們就要自己去實現一個類似treeLi
 Android中AutoCompleteTextView與TextWatcher結合小實例
Android中AutoCompleteTextView與TextWatcher結合小實例
AutoCompleteTextView是實現動態匹配輸入內容的一種輸入框(EditText),如輸入“and”時,會提示“Android”效果圖:實現代碼:packag
 深入理解JNI
深入理解JNI
最近在學習android底層的一些東西,看了一些大神的博客,整體上有了一點把握,也產生了很多疑惑,於是再次把鄧大神的深入系列翻出來仔細看看,下面主要是一些閱讀筆記。JNI
 Android仿騰訊QQ實現滑動刪除 附源碼下載
Android仿騰訊QQ實現滑動刪除 附源碼下載
看了很多大神們的文章,感覺受益良多,也非常欣賞大家的分享態度,所以決定開始寫Blog,給大家分享自己的心得。先看看效果圖:本來准備在ListView的每個Item的布局上