編輯:關於Android編程
public class MyParcelable implements Parcelable { private int mData; public int describeContents() { return 0; } public void writeToParcel(Parcel out, int flags) { out.writeInt(mData); } public static final Parcelable.CreatorCREATOR = new Parcelable.Creator () { public MyParcelable createFromParcel(Parcel in) { return new MyParcelable(in); } public MyParcelable[] newArray(int size) { return new MyParcelable[size]; } }; private MyParcelable(Parcel in) { mData = in.readInt(); } }
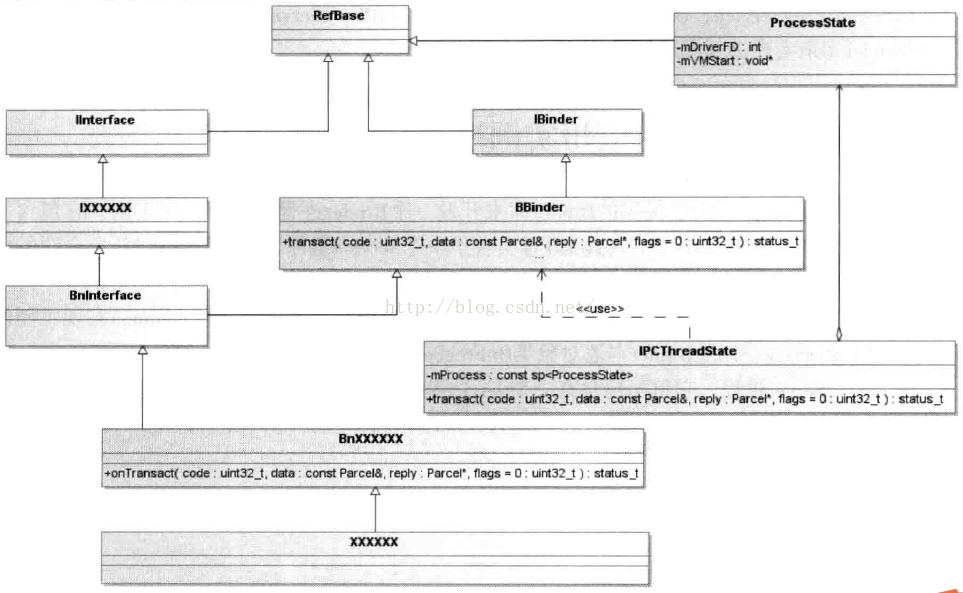
class IInterface : public virtual RefBase templateINTERFACE是進程自定義的Service組件接口、BBinder為Binder本地對象提供了抽象的進程間通信接口、BpRefBase為Binder代理對象提供了抽象的進程間通信接口。 BnInterface為Binder本地對象, Service端使用,對應Binder驅動程序中的Binder實體對象;BpInterface為Binder代理對象,Client端使用,對應Binder驅動程序中的Binder引用對象。用戶需要編寫一個BnXXXX實現BnInterface//INTERFACE為自定義的一個接口繼承IInterface class BnInterface : public INTERFACE, public BBinder template ///INTERFACE為自定義的一個接口繼承IInterface class BpInterface : public INTERFACE, public BpRefBase
class BBinder : public IBinder{
public: ``````````````
virtual status_t transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags = 0);
//IPCThreadState就會代用BBinder子類的該方法,該方法內部會調用BnXXXX對onTransact方法的實現。
protected: ````````````
virtual status_t onTransact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags = 0);
//BnXXXX實現BnInterface時就會定義該方法
};
class BpRefBase : public virtual RefBase {
protected: ·······
BpRefBase(const sp& o);
inline IBinder* remote(){ return mRemote; }
private: ······
BpRefBase(const BpRefBase& o);
IBinder* const mRemote; //note1
};
1、指向一個BpBinder對象
BpBinder@{ binder / BpBinder.h}
class BpBinder : public IBinder {
public: ·········
inline int32_t handle() const { return mHandle; }
virtual status_t transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags = 0); //note2
private: ·······
const int32_t mHandle; //note1
};
1、該整數表示一個Client組件的句柄值。每一個Client組件在驅動程序對應一個Binder引用對象。
2、BpBinder的transact方法會把自己的mHandler和進程間通信數據發送給Binder驅動程序。Binder驅動程序根據mHandler找到對應的Binder引用對象,進而找到Binder實體對象(Binder驅動層能夠完成BpBinder到BBinder之間的映射),最後將通信數據發送給Service組件。(對於如何通過BpBinder找到BBBinder推薦查閱博文,搜索關鍵字sp
class IPCThreadState {
public: ········
static IPCThreadState* self();
//當前線程是Binder線程,通過它獲取一個IPCThreadState對象,該對象可以跟Binder驅動層通信。
status_t transact(int32_t handle, uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags);
//與Binder驅動程序交互,底層通過talkWithDriver實現
private:············
status_t sendReply(const Parcel& reply, uint32_t flags);
status_t waitForResponse(Parcel *reply, status_t *acquireResult=NULL);
status_t talkWithDriver(bool doReceive=true); //向Binder驅動發送數據也從Binder驅動接收數據
status_t writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle,
uint32_t code,
const Parcel& data,
status_t* statusBuffer);
status_t executeCommand(int32_t command);
const sp mProcess; //初始化Binder設備
};
對於每個Binder線程池中它都有一個IPCThreadState對象
Service組件結構圖

 Client組件結構圖
Client組件結構圖
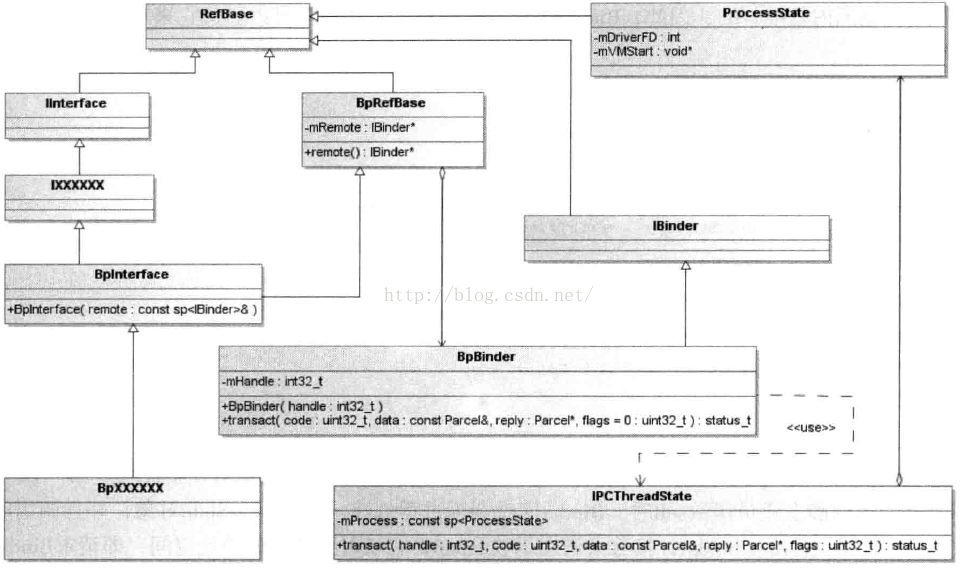 上面的分析我們可以簡單的獲得以下幾個結論:
上面的分析我們可以簡單的獲得以下幾個結論:
void *svcmgr_handle; //ServerManager.c的一個局部變量
int main(int argc, char **argv)
{
struct binder_state *bs; //note 1
void *svcmgr = BINDER_SERVICE_MANAGER; //note2
bs = binder_open(128*1024); //note3
if (binder_become_context_manager(bs)) { //note4
return -1;
}
svcmgr_handle = svcmgr; //note5
binder_loop(bs, svcmgr_handler); //note6
return 0;
}
1、
struct binder_state{
int fd; //設備描述符
void *mmaped; //映射空間起始地址
unsigned mapsize; //映射空間大小
//映射是將設備文件映射到進程的地址空間,用於緩存進程間通信的數據
}
struct binder_state *binder_open(unsigned mapsize)
{
struct binder_state *bs;
bs = malloc(sizeof(*bs));
if (!bs) { errno = ENOMEM; return 0; }
bs->fd = open("/dev/binder", O_RDWR); //note1
if (bs->fd < 0) { fprintf(stderr,"binder: cannot open device (%s)\n",strerror(errno)); goto fail_open; }
bs->mapsize = mapsize;
bs->mapped = mmap(NULL, mapsize, PROT_READ, MAP_PRIVATE, bs->fd, 0); //note2
if (bs->mapped == MAP_FAILED) {fprintf(stderr,"binder: cannot map device (%s)\n", strerror(errno)); goto fail_map;}
return bs;
fail_map:
close(bs->fd);
fail_open:
free(bs);
return 0;
}
1、該方法最終導致Binder驅動程序的binder_open方法被調用
binder_become_context_manager()@{ servicemanager / binder.c}
#define BINDER_SET_CONTEXT_MGR _IOW('b', 7, int)
int binder_become_context_manager(struct binder_state *bs)
{
return ioctl(bs->fd, BINDER_SET_CONTEXT_MGR, 0); //note1
}
1、該方法會導致Binder驅動的binder_ioctl方法被調用。binder_ioctl方法多次被使用到,已經貼在後面的附錄一中。
通過向Binder驅動層發送BINDER_SET_CONTEXT_MGR協議將自己注冊到Binder驅動程序中。ioctl中最後一個參數,表示當前Service Manager對應的本地Binder對象的地址值,Service Manager對應Binder本地對象值為0;
binder_loop()@{ servicemanager / binder.c}
BC_ENTER_LOOPER = _IO('c', 12),
BINDER_WRITE_READ _IOWR('b', 1, struct binder_write_read)
void binder_loop(struct binder_state *bs, binder_handler func){
int res;
struct binder_write_read bwr;
unsigned readbuf[32];
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(unsigned));//note1
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (unsigned) readbuf;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr); //note2
if (res < 0) { LOGE("binder_loop: ioctl failed (%s)\n", strerror(errno)); break; }
res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func); //note3
if (res == 0) { LOGE("binder_loop: unexpected reply?!\n"); break;}
if (res < 0) { LOGE("binder_loop: io error %d %s\n", res, strerror(errno)); break; }
}
}
1、該方法用於將當前線程注冊到Binder驅動程序中,成為Binder線程,Binder驅動程序隨後可以將進程間通信請求交付給該線程進行處理
int binder_write(struct binder_state *bs, void *data, unsigned len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len;
bwr.write_consumed = 0;
bwr.write_buffer = (unsigned) data;
bwr.read_size = 0; //輸出緩存區為空,則一旦完成注冊,就會退回到用戶空間中。
bwr.read_consumed = 0;
bwr.read_buffer = 0;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr); //note1
if (res < 0) {
fprintf(stderr,"binder_write: ioctl failed (%s)\n", strerror(errno));
}
return res;
}
1、向Binder驅動層發送一個BINDER_WRITE_READ協議報文
2、該方法的bwr參數的輸出緩存區長度為readbuf大小,輸入緩存區長度等於0,因此只會調用函數binder_thread_read。如果ServiceManager進程的主線程沒有待處理的工作項,它將會睡眠在Binder驅動程序的binder_thread_read中,等待其它Service和Client向它發送進程間通信請求。
3、解析獲得的readbuf數據,使用binder_handler func處理
binder_parse()@{ servicemanager / binder.c}
int binder_parse(struct binder_state *bs, struct binder_io *bio, uintptr_t ptr, size_t size, binder_handler func) {
int r = 1;
uintptr_t end = ptr + (uintptr_t) size;
while (ptr < end) {
uint32_t cmd = *(uint32_t *) ptr;
ptr += sizeof(uint32_t);
switch(cmd) {
case BR_NOOP:
break;
case BR_TRANSACTION_COMPLETE:
break;
case BR_INCREFS:
case BR_ACQUIRE:
case BR_RELEASE:
case BR_DECREFS:
ptr += sizeof(struct binder_ptr_cookie);
break;
case BR_TRANSACTION: { //note1
struct binder_transaction_data *txn = (struct binder_transaction_data *) ptr;
if ((end - ptr) < sizeof(*txn)) { return -1; }
binder_dump_txn(txn);
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
bio_init(&reply, rdata, sizeof(rdata), 4);
bio_init_from_txn(&msg, txn);
res = func(bs, txn, &msg, &reply); //note2
binder_send_reply(bs, &reply, txn->data.ptr.buffer, res); //note3
}
ptr += sizeof(*txn);
break;
}
case BR_REPLY: {
......
break;
}
case BR_DEAD_BINDER: {
........
break;
}
case BR_FAILED_REPLY:
r = -1;
break;
case BR_DEAD_REPLY:
r = -1;
break;
default:
return -1;
}
}
return r;
}
1、接收到一個IPCThreadState層協議——BR_TRANSACTION;
2、調用func處理,func等於servicemanager / service_manager.c的svcmgr_handle對象。
3、向Binder驅動器發送BC_REPLY協議報文
svcmgr_handler()@{ servicemanager / service_manager.c}
int svcmgr_handler(struct binder_state *bs, struct binder_txn *txn, struct binder_io *msg, struct binder_io *reply) {
struct svcinfo *si;
uint16_t *s;
unsigned len;
void *ptr;
uint32_t strict_policy;
if (txn->target != svcmgr_handle) return -1;
strict_policy = bio_get_uint32(msg);
s = bio_get_string16(msg, &len);
if ((len != (sizeof(svcmgr_id) / 2)) ||
memcmp(svcmgr_id, s, sizeof(svcmgr_id))) {
fprintf(stderr,"invalid id %s\n", str8(s));
return -1;
}
switch(txn->code) {
case SVC_MGR_GET_SERVICE:
case SVC_MGR_CHECK_SERVICE:
s = bio_get_string16(msg, &len);
ptr = do_find_service(bs, s, len); //從列表中查找服務
if (!ptr) break;
bio_put_ref(reply, ptr); //這裡是{servicemanager / binder.c}中的方法;ptr是句柄號,將內容寫入到reply中。
return 0;
case SVC_MGR_ADD_SERVICE:
s = bio_get_string16(msg, &len);
ptr = bio_get_ref(msg);
if (do_add_service(bs, s, len, ptr, txn->sender_euid)) return -1;
break;
case SVC_MGR_LIST_SERVICES: {
unsigned n = bio_get_uint32(msg);
si = svclist;
while ((n-- > 0) && si)
si = si->next;
if (si) {
bio_put_string16(reply, si->name);
return 0;
}
return -1;
}
default: return -1;
}
bio_put_uint32(reply, 0);
return 0;
}
binder_send_reply()@{ servicemanager / binder.c}
void binder_send_reply(struct binder_state *bs, struct binder_io *reply, binder_uintptr_t buffer_to_free, int status) {
struct {
uint32_t cmd_free;
binder_uintptr_t buffer;
uint32_t cmd_reply;
struct binder_transaction_data txn;
} __attribute__((packed)) data;
data.cmd_free = BC_FREE_BUFFER;
data.buffer = buffer_to_free;
data.cmd_reply = BC_REPLY;
data.txn.target.ptr = 0;
data.txn.cookie = 0;
data.txn.code = 0;
if (status) {
data.txn.flags = TF_STATUS_CODE;
data.txn.data_size = sizeof(int);
data.txn.offsets_size = 0;
data.txn.data.ptr.buffer = (uintptr_t)&status;
data.txn.data.ptr.offsets = 0;
} else {
data.txn.flags = 0;
data.txn.data_size = reply->data - reply->data0;
data.txn.offsets_size = ((char*) reply->offs) - ((char*) reply->offs0);
data.txn.data.ptr.buffer = (uintptr_t)reply->data0;
data.txn.data.ptr.offsets = (uintptr_t)reply->offs0;
}
binder_write(bs, &data, sizeof(data)); //在binder_loop()已經介紹過會
}
這裡需要特別注意的是ServiceManager跟普通Service的不同之處還在於。對於普通XXService,Client獲取到一個BpXXService,然後調用它的一個方法,最終通過Binder機制會將數據交給BnXXService的同名方法處理。然而對於ServiceManager,Client獲取到一個BpServiceManager,然後調用它的一個方法,如getService,最終通過Binder機制會將數據交給svcmgr_handler()@{ servicemanager / service_manager.c}處理,而不是交給BnServiceManage處理!!!詳細參考鏈接
ServiceManager注冊:
spBinder庫中定義了一個gDefaultServiceManager全局變量,而且采用了單例的模式進行實現,getDefaultServiceManager方法獲得的就是該全局變量。在第一次請求該變量的時候會通過如下的方式獲取一個ServiceManager代理。interface_casrdefaultServiceManager() { if (gDefaultServiceManager != NULL) return gDefaultServiceManager; { AutoMutex _l(gDefaultServiceManagerLock); if (gDefaultServiceManager == NULL) { gDefaultServiceManager = interface_cast ( ProcessState::self()->getContextObject(NULL)); } } return gDefaultServiceManager; }
getStrongProxyForHandle的操作主要有:(方法參數為int32_t handle) spresult; handle_entry* e = lookupHandleLocked(handle); if (e != NULL) { IBinder* b = e->binder; if (b == NULL || !e->refs->attemptIncWeak(this)) { b = new BpBinder(handle); //創建一個BpBinder,該構造器會調用IPCThreadState::self()->incWeakHandle(handle)方法,創建了一個IPCThreadState對象 e->binder = b; if (b) e->refs = b->getWeakRefs(); result = b; } else { result.force_set(b); e->refs->decWeak(this); } } return result;
virtual status_t addService(const String16& name, const sp前面已經介紹Remote方法獲取的是一個BpBinder對象,調用BpBinder對象的transact方法將數據和當前BpBinder對應的句柄發送給Binder驅動層處理。數據封裝成一個ADD_SERVICE_TRANSACTION的協議報文交給Binder層處理。& service){ Parcel data, reply; data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor()); data.writeString16(name); data.writeStrongBinder(service); status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply); return err == NO_ERROR ? reply.readExceptionCode() : err; }
status_t BpBinder::transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) //最後一個參數為0表示同步進程間請求,否則異步;默認為0
{
if (mAlive) {
status_t status = IPCThreadState::self()->transact( mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
Binder層的數據繼續包裝成一個IPCThreadState層的BC_TRANSACTION協議報文交給IPCThreadState層處理,調用IPCThreadState對象的transact方法
IPCThreadState::transact()@{ binder / IPCThreadState.cpp}
status_t IPCThreadState::transact(int32_t handle, uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) {
status_t err = data.errorCheck(); //檢查數據知否正確
flags |= TF_ACCEPT_FDS; //flag設置標志位
if (err == NO_ERROR) {
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL); //note1
}
if ((flags & TF_ONE_WAY) == 0) { //同步請求
if (reply) { err = waitForResponse(reply); }
else {
Parcel fakeReply;
err = waitForResponse(&fakeReply); //等待Service的返回數據
}
}
else { err = waitForResponse(NULL, NULL); } //不等待Service的返回數據
return err;
}
1、 將BC_TRANSACTION協議報文數據寫入到binder_transaction_data結構體中。 再將該對象寫入到IPCThreadState中的一個Parcel輸出緩沖區中
IPCThreadState::waitForResponse()@{ binder / IPCThreadState.cpp}
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult){
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break; //note1
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32(); //note2
switch (cmd) {
case BR_TRANSACTION_COMPLETE: //note3
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION;
goto finish;
case BR_ACQUIRE_RESULT:
```````
goto finish;
case BR_REPLY: { //note4
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
if (err != NO_ERROR) goto finish;
if (reply) { //reply不為空則給它設值
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t),
freeBuffer, this);
} .....
}
} else {
......
continue;
}
}
goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
}
1、與Binder驅動程序交互,將前面IPCThreadState::transact()方法中向Parcel輸出緩沖區中寫入的數據傳給Binder驅動
2、讀取Binder驅動返回的協議報文
3、收到來自Binder驅動器層的BR_TRANSACTION_COMPLETE協議報文,如果 if (!reply && !acquireResult)為真則退出giant方法,否則繼續等待下一個協議報文
4、收到來自Binder驅動器層的BR_REPLY:協議報文,讀取報文中的數據交給Parcel *reply。隨後用戶就可以讀取其中的數據了
IPCThreadState::talkWithDriver()@{ binder / IPCThreadState.cpp}
status_t IPCThreadState::talkWithDriver(bool doReceive){
binder_write_read bwr;
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (long unsigned int)mOut.data(); //即將寫入到Binder驅動的數據
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (long unsigned int)mIn.data(); //獲得Binder驅動返回的數據
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) ///note1
....
}
1、將獲取到的數據封裝成一個Binder驅動層的BINDER_WRITE_READ協議報文,交給Binder啟動層處理。使用ioctl方法向Binder驅動層傳輸數據,IPCThreadState的mProcess變量的mDriverFD即/dev/driver文件描述符。
綜上addService方法首先將參數String16& name, spvirtual spcheckService()@{binder/IServiceManager.cpp}getService(const String16& name) const { unsigned n; for (n = 0; n < 5; n++){ sp svc = checkService(name); if (svc != NULL) return svc; sleep(1); } return NULL; }
virtual sp與addService方法類似,getService方法首先將參數String16& name包裝成一個Binder層的CHECK_SERVICE_TRANSACTION協議報文,傳給Binder層處理。之後數據包裝成 IPCThreadState層的BC_TRANSACTION協議報文。最後數據又被包裝成Binder驅動層的BINDER_WRITE_READ協議報文交給Binder驅動層處理。checkService( const String16& name) const{ Parcel data, reply; data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor()); data.writeString16(name); remote()->transact(CHECK_SERVICE_TRANSACTION, data, &reply); return reply.readStrongBinder(); }
int main(int argc, char** argv){
//獲得一個ProcessState實例,前面已經介紹過
sp proc(ProcessState::self());
//得到一個ServiceManager對象,前面已經介紹過
sp sm = defaultServiceManager();
MediaPlayerService::instantiate();//note1
ProcessState::self()->startThreadPool();//note2
IPCThreadState::self()->joinThreadPool();//note3
}
1、MediaPlayerService實例化,該方法內部為defaultServiceManager()->addService(String16("media.player"), new MediaPlayerService())方法。service_manager收到addService的請求,然後把對應信息放到自己保存的一個服務list中。具體內容參見前面的addService說明。
2、啟動一個Binder線程池
void ProcessState::startThreadPool() {
AutoMutex _l(mLock);
if (!mThreadPoolStarted) {
mThreadPoolStarted = true;
spawnPooledThread(true);
}
}
spawnPooledThread()@{ binder / ProcessState.cpp}
void ProcessState::spawnPooledThread(bool isMain) {
if (mThreadPoolStarted) {
int32_t s = android_atomic_add(1, &mThreadPoolSeq);
char buf[32];
sprintf(buf, "Binder Thread #%d", s);
sp t = new PoolThread(isMain); //創建PoolThread對象
t->run(buf); //啟動該線程池
}
}
joinThreadPool()@{ binder / IPCThreadState.cpp}
void IPCThreadState::joinThreadPool(bool isMain) { //默認參數為ture
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER); //note1
status_t result;
do {
int32_t cmd;
......
result = talkWithDriver(); //note2
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) continue;
cmd = mIn.readInt32();
result = executeCommand(cmd); //處理從Binder驅動返回回來的協議數據
}
....
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}
1、形成一個BC_ENTER_LOOPER 協議報文,將報文寫入mOut的Parcel輸出緩沖區中。isMain == true表示進入到Looper,否則為注冊到Looper;
2、將mOut緩沖區中的數據傳給Binder驅動,上面我們知道這裡會將數據包裝成一個Binder驅動層的BINDER_WRITE_READ協議報文交給Binder驅動層處理
executeCommand()@{ binder / IPCThreadState.cpp}
status_t IPCThreadState::executeCommand(int32_t cmd)
{
BBinder* obj;
RefBase::weakref_type* refs;
status_t result = NO_ERROR;
switch (cmd) {
case BR_ERROR:
result = mIn.readInt32();
break;
case BR_OK:
break;
case BR_ACQUIRE:
refs = (RefBase::weakref_type*)mIn.readInt32();
obj = (BBinder*)mIn.readInt32();
obj->incStrong(mProcess.get());
mOut.writeInt32(BC_ACQUIRE_DONE);
mOut.writeInt32((int32_t)refs);
mOut.writeInt32((int32_t)obj);
break;
case BR_RELEASE:
refs = (RefBase::weakref_type*)mIn.readInt32();
obj = (BBinder*)mIn.readInt32();
mPendingStrongDerefs.push(obj);
break;
case BR_INCREFS:
refs = (RefBase::weakref_type*)mIn.readInt32();
obj = (BBinder*)mIn.readInt32();
refs->incWeak(mProcess.get());
mOut.writeInt32(BC_INCREFS_DONE);
mOut.writeInt32((int32_t)refs);
mOut.writeInt32((int32_t)obj);
break;
case BR_DECREFS:
refs = (RefBase::weakref_type*)mIn.readInt32();
obj = (BBinder*)mIn.readInt32();
mPendingWeakDerefs.push(refs);
break;
case BR_ATTEMPT_ACQUIRE:
refs = (RefBase::weakref_type*)mIn.readInt32();
obj = (BBinder*)mIn.readInt32(); {
const bool success = refs->attemptIncStrong(mProcess.get());
mOut.writeInt32(BC_ACQUIRE_RESULT);
mOut.writeInt32((int32_t)success);
}
break;
case BR_TRANSACTION:{
binder_transaction_data tr;
result = mIn.read(&tr, sizeof(tr));
if (result != NO_ERROR) break;
Parcel buffer;
buffer.ipcSetDataReference(
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t), freeBuffer, this);
const pid_t origPid = mCallingPid;
const uid_t origUid = mCallingUid;
mCallingPid = tr.sender_pid;
mCallingUid = tr.sender_euid;
mOrigCallingUid = tr.sender_euid;
int curPrio = getpriority(PRIO_PROCESS, mMyThreadId);
if (gDisableBackgroundScheduling) {
if (curPrio > ANDROID_PRIORITY_NORMAL) {
setpriority(PRIO_PROCESS, mMyThreadId, ANDROID_PRIORITY_NORMAL);
}
} else {
if (curPrio >= ANDROID_PRIORITY_BACKGROUND) {
set_sched_policy(mMyThreadId, SP_BACKGROUND);
}
}
Parcel reply;
if (tr.target.ptr) {
sp b((BBinder*)tr.cookie);
const status_t error = b->transact(tr.code, buffer, &reply, tr.flags); //調用BBinder的transact方法處理,實則底層就是調用具體服務的onTransact方法!
if (error < NO_ERROR) reply.setError(error);
} else {
const status_t error = the_context_object->transact(tr.code, buffer, &reply, tr.flags);
if (error < NO_ERROR) reply.setError(error);
}
if ((tr.flags & TF_ONE_WAY) == 0) {
sendReply(reply, 0); //發送一個IPCThreadState層的BC_REPLY協議報文給Binder驅動層
} else { }
mCallingPid = origPid;
mCallingUid = origUid;
mOrigCallingUid = origUid;
}
break;
case BR_DEAD_BINDER:
{
BpBinder *proxy = (BpBinder*)mIn.readInt32();
proxy->sendObituary();
mOut.writeInt32(BC_DEAD_BINDER_DONE);
mOut.writeInt32((int32_t)proxy);
} break;
case BR_CLEAR_DEATH_NOTIFICATION_DONE:
{
BpBinder *proxy = (BpBinder*)mIn.readInt32();
proxy->getWeakRefs()->decWeak(proxy);
} break;
case BR_FINISHED:
result = TIMED_OUT;
break;
case BR_NOOP:
break;
case BR_SPAWN_LOOPER:
mProcess->spawnPooledThread(false);
break;
default:
result = UNKNOWN_ERROR;
break;
}
if (result != NO_ERROR) {
mLastError = result;
}
return result;
}
BBinder::transact()
status_t BBinder::transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) {
err = onTransact(code, data, reply, flags); //就是調用自己的onTransact函數嘛
return err;
}
sendReply()@{ binder / IPCThreadState.cpp}
status_t IPCThreadState::sendReply(const Parcel& reply, uint32_t flags)
{
status_t err;
status_t statusBuffer;
err = writeTransactionData(BC_REPLY, flags, -1, 0, reply, &statusBuffer);
if (err < NO_ERROR) return err;
return waitForResponse(NULL, NULL);
}
Service注冊:
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
trace_binder_ioctl(cmd, arg);
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret)
goto err_unlocked;
binder_lock(__func__);
thread = binder_get_thread(proc);
if (thread == NULL) {
ret = -ENOMEM;
goto err;
}
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto err;
}
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) { //獲取用戶態的binder_write_read對象
ret = -EFAULT;
goto err;
}
if (bwr.write_size > 0) {//如果輸入緩沖區長度大於0則調用binder_thread_write方法
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
trace_binder_write_done(ret);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (bwr.read_size > 0) {//如果輸出緩沖區長度大於0則調用binder_thread_read方法
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
case BINDER_SET_MAX_THREADS:
if (copy_from_user(&proc->max_threads, ubuf, sizeof(proc->max_threads))) {
ret = -EINVAL;
goto err;
}
break;
case BINDER_SET_CONTEXT_MGR:
if (binder_context_mgr_node != NULL) {
printk(KERN_ERR "binder: BINDER_SET_CONTEXT_MGR already set\n");
ret = -EBUSY;
goto err;
}
ret = security_binder_set_context_mgr(proc->tsk);
if (ret < 0)
goto err;
if (binder_context_mgr_uid != -1) {
if (binder_context_mgr_uid != current->cred->euid) {
printk(KERN_ERR "binder: BINDER_SET_"
"CONTEXT_MGR bad uid %d != %d\n",
current->cred->euid,
binder_context_mgr_uid);
ret = -EPERM;
goto err;
}
} else
binder_context_mgr_uid = current->cred->euid;
binder_context_mgr_node = binder_new_node(proc, NULL, NULL);
if (binder_context_mgr_node == NULL) {
ret = -ENOMEM;
goto err;
}
binder_context_mgr_node->local_weak_refs++;
binder_context_mgr_node->local_strong_refs++;
binder_context_mgr_node->has_strong_ref = 1;
binder_context_mgr_node->has_weak_ref = 1;
break;
case BINDER_THREAD_EXIT:
binder_debug(BINDER_DEBUG_THREADS, "binder: %d:%d exit\n",
proc->pid, thread->pid);
binder_free_thread(proc, thread);
thread = NULL;
break;
case BINDER_VERSION:
if (size != sizeof(struct binder_version)) {
ret = -EINVAL;
goto err;
}
if (put_user(BINDER_CURRENT_PROTOCOL_VERSION, &((struct binder_version *)ubuf)->protocol_version)) {
ret = -EINVAL;
goto err;
}
break;
default:
ret = -EINVAL;
goto err;
}
ret = 0;
err:
if (thread)
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
binder_unlock(__func__);
wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
if (ret && ret != -ERESTARTSYS)
printk(KERN_INFO "binder: %d:%d ioctl %x %lx returned %d\n", proc->pid, current->pid, cmd, arg, ret);
err_unlocked:
trace_binder_ioctl_done(ret);
return ret;
}
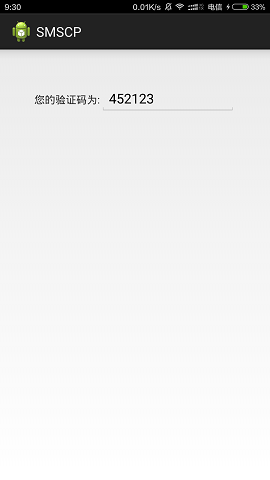 Android短信驗證碼自動填充功能
Android短信驗證碼自動填充功能
筆者發現在很多應用中,都有自動獲取驗證碼的功能:點擊獲取驗證碼按鈕,收到短信,當前應用不需要退出程序就可以獲取到短信中的驗證碼,並自動填充。覺得這種用戶體驗很贊,無須用戶
 Android提供的系統服務之--AlarmManager(鬧鐘服務)
Android提供的系統服務之--AlarmManager(鬧鐘服務)
本節引言: 本節主要介紹的是Android系統服務中的---AlarmManager(鬧鐘服務), 除了開發手機鬧鐘外,更多的時候是作為一個全
 Android手機無法連接無線網絡解決辦法匯總大全
Android手機無法連接無線網絡解決辦法匯總大全
一、手機搜索不到無線信號怎麼辦?1、在無法搜索到無線信號時,請確定無線終端在無線網絡覆蓋范圍內,點擊“掃描”刷新無線網絡列表。如下圖
 解決Android設備插入打印機無法啟動
解決Android設備插入打印機無法啟動
一直在想起一個什麼題目好一些,題目只是最初的現實,經過不斷調試最後很是其它問題,想要起一個其它名字比如《打印機驅動中熱插拔事件中添加DEVTYPE》。但是最後想了想還是回