編輯:關於Android編程
最近在做百度地圖的實時路線繪制,發現一些問題,比如由於定位漂移帶來的路線繪制偏差,還有由於定位漂移,導致人未走動時,也會繪制路線等。百度鷹眼的線路糾偏個人感覺很一般啊。而且有限漂移了兩百米的點他也沒有糾正過來。所以最後還是決定自己寫一個糾偏吧。而且百度地圖官方的dome和示例代碼真的很示例啊。然人摸不著頭腦。ok進入正題,思路是這樣的,因為實時繪制線路都是在室外,所以只采用gps定位,不采用無線網絡定位。這樣漂移一兩百米的點基本不會出現。第二當人在等紅綠燈時,人是靜止的,但是定位有可能會漂移,所以這部分我們采用手機感應器進行判斷是否移動。ok大體方向確定了,接下來就是進行功能劃分然後開發了。功能模塊主要涉及以下幾點
地圖定位 繪制當前位置 獲取位置進行糾偏 判斷是否移動 繪制線路 線路規劃這裡貼出的代碼是基於各位亦有一定百度地圖開發基礎為參照,如果看不懂可留下郵箱我每晚發送源代碼給各位,我是用jar包是3.7.3版的,各位如果使用其他版本的包,可能會出現百度地圖初始化失敗的現象。對我被坑過。
package com.example.baidutext;
import java.io.File;
import java.io.FileNotFoundException;
import java.io.FileOutputStream;
import java.io.IOException;
import java.text.SimpleDateFormat;
import java.util.ArrayList;
import java.util.Date;
import java.util.List;
import android.app.Activity;
import android.app.AlertDialog;
import android.app.AlertDialog.Builder;
import android.app.ProgressDialog;
import android.content.Context;
import android.content.DialogInterface;
import android.content.DialogInterface.OnClickListener;
import android.content.Intent;
import android.content.IntentFilter;
import android.content.SharedPreferences;
import android.content.SharedPreferences.Editor;
import android.graphics.Color;
import android.hardware.Sensor;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.os.PowerManager;
import android.os.PowerManager.WakeLock;
import android.view.Menu;
import android.view.MenuItem;
import android.widget.Toast;
import com.baidu.location.BDLocation;
import com.baidu.location.BDLocationListener;
import com.baidu.location.LocationClient;
import com.baidu.location.LocationClientOption;
import com.baidu.mapapi.SDKInitializer;
import com.baidu.mapapi.map.BaiduMap;
import com.baidu.mapapi.map.BaiduMap.OnMapLongClickListener;
import com.baidu.mapapi.map.BitmapDescriptor;
import com.baidu.mapapi.map.BitmapDescriptorFactory;
import com.baidu.mapapi.map.MapStatus;
import com.baidu.mapapi.map.MapStatusUpdate;
import com.baidu.mapapi.map.MapStatusUpdateFactory;
import com.baidu.mapapi.map.MapView;
import com.baidu.mapapi.map.MarkerOptions;
import com.baidu.mapapi.map.OverlayOptions;
import com.baidu.mapapi.map.PolylineOptions;
import com.baidu.mapapi.model.LatLng;
import com.baidu.mapapi.search.route.BikingRouteResult;
import com.baidu.mapapi.search.route.DrivingRouteResult;
import com.baidu.mapapi.search.route.OnGetRoutePlanResultListener;
import com.baidu.mapapi.search.route.PlanNode;
import com.baidu.mapapi.search.route.RoutePlanSearch;
import com.baidu.mapapi.search.route.TransitRouteResult;
import com.baidu.mapapi.search.route.WalkingRoutePlanOption;
import com.baidu.mapapi.search.route.WalkingRouteResult;
import com.baidu.mapapi.utils.DistanceUtil;
public class MainActivity extends Activity {
/**
* 百度地圖視圖
*/
private MapView map_v=null;
/**
* 百度地圖管理器
*/
private BaiduMap BaiDuMap;
// /**
// * 位置管理器
// */
// private LocationManager locationManager;
/**
* 位置客戶端
*/
private LocationClient locationClient = null;
/**
* 獲取位置時間間隔單位(秒)
*/
private final int time= 1000*9;
// /**
// * 定位數據
// */
// private MyLocationData locData;
/**
* 構建Marker圖標
*/
private BitmapDescriptor bitmap,StartBitmap,EndBitmap;
/**
*判斷是否第一次定位
*/
private boolean isFirstLoc=true;
/**
* 是否處於路線規劃
*/
private boolean isGetRoute=false;
/**
* 是否獲取新路線
*/
private boolean isGetNewRoute=true;
/**
* 定位位置數據
* 多線程在修改本數據,需要增加一個鎖;
*/
private List pointList = new ArrayList();
/**
// * 判斷是否處於暫停
// */
// private boolean isPause=false;
/**
* 描述地圖將要發生的變化
*/
protected MapStatusUpdate msUpdate = null;
/**
* 覆蓋物
*/
protected OverlayOptions overlay,StartOverlay,EndOverlay;
/**
* 路線覆蓋物
*/
private PolylineOptions polyline = null;
/**
* 手機加速度感應器服務注冊
*/
private SensorManager sm = null;
private Acc acc=new Acc();
/**
* 最大距離單位(米)
*/
private final Double MaxDistance=90.00;
/**
* 最小距離單位(米)
*/
private final Double MinDistance=2.0;
/**
* 電源鎖
*/
public static WakeLock wakeLock=null;
private PowerReceiver powerReceiver = new PowerReceiver();
/**
*最近位置信息
*/
private LatLng latLng;
/**
* 因距離太大丟失的點數
*/
private int LostLoc=0;
/**
* 第一次定位丟失的點數
*/
private int FLostLoc=0;
/**
* 程序名稱
*/
private final String APP_FOLDER_NAME = "LocationDemo";
/**
* 路線規劃監聽
*/
private RoutePlanSearch mSearch;
/**
* 當前位置,終點位置
*/
private LatLng ll,EndLL;
/**
* 路線規劃等待進度框
*/
private ProgressDialog progressDialog;
/**
* 獲取位置距離常量
*/
private int constant=0;
/* (non-Javadoc)
* @see android.app.Activity#onCreate(android.os.Bundle)
*/
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
sm = (SensorManager) getSystemService(SENSOR_SERVICE);
SDKInitializer.initialize(getApplicationContext());
// activityList.add(this);
setContentView(R.layout.activity_main);
init();
//設置定位監聽
locationClient.registerLocationListener(new BDLocationListener(){
@Override
public void onReceiveLocation(BDLocation location) {
// TODO Auto-generated method stub
// locData = new MyLocationData.Builder()
// .accuracy(0)
// // 此處設置開發者獲取到的方向信息,順時針0-360
// .direction(0).latitude(location.getLatitude())
// .longitude(location.getLongitude()).build();
// // 設置定位數據
// BaiDuMap.setMyLocationData(locData);
ll = new LatLng(location.getLatitude(),
location.getLongitude());
progressDialog.dismiss();
if(isFirstLoc||isGetRoute){
if(!isGetRoute){
MapStatusUpdate u = MapStatusUpdateFactory.newLatLng(ll);
BaiDuMap.animateMapStatus(u);
}
// MyLocationConfiguration config = new MyLocationConfiguration(LocationMode.NORMAL, true, bitmap);//普通(LocationMode.NORMAL)、跟隨(LocationMode.FOLLOWING)、羅盤(LocationMode.COMPASS)
// BaiDuMap.setMyLocationConfigeration(config);
isFirstLoc=false;
if(constantDistanceUtil.getDistance(pointList.get(constant+1),ll)){
save("距離: "+DistanceUtil.getDistance(pointList.get(constant+1),ll)+" 時間: "+getStringDate()+" 點數: "+constant);
if(DistanceUtil.getDistance(pointList.get(constant+1),ll)>100&&isGetNewRoute){
IsGetNewRoute();
}
constant++;
}else{
save("距離: "+DistanceUtil.getDistance(pointList.get(constant),ll)+" 時間: "+getStringDate()+" 點數: "+constant);
if(DistanceUtil.getDistance(pointList.get(constant),ll)>100&&isGetNewRoute){
IsGetNewRoute();
}
}
}
drawRealtimePoint(ll);
}else{
showRealtimeTrack(location);
}
}
});
locationClient.start();
//路線規劃回調
OnGetRoutePlanResultListener listener = new OnGetRoutePlanResultListener(){
@Override
public void onGetBikingRouteResult(BikingRouteResult arg0) {
// TODO Auto-generated method stub
}
@Override
public void onGetDrivingRouteResult(DrivingRouteResult arg0) {
// TODO Auto-generated method stub
}
@Override
public void onGetTransitRouteResult(TransitRouteResult arg0) {
// TODO Auto-generated method stub
}
@Override
public void onGetWalkingRouteResult(WalkingRouteResult WalkingRoute) {
// TODO Auto-generated method stub
if(WalkingRoute.getRouteLines()!=null){
constant =0;
isGetNewRoute=true;
for(int i=0;i0)
pointList.clear();
if(StartOverlay!=null)
StartOverlay=null;
if(EndOverlay!=null)
EndOverlay=null;
}
return super.onMenuItemSelected(featureId, item);
}
@Override
public boolean onCreateOptionsMenu(Menu menu) {
// TODO Auto-generated method stub
return super.onCreateOptionsMenu(menu);
}
/*
* 將數據臨時保存到xml文件
*/
private boolean saveArray() {
deleteXML();
SharedPreferences sp= getSharedPreferences("lat", Context.MODE_APPEND);
Editor mEdit1= sp.edit();
mEdit1.remove("Status_size");
mEdit1.putInt("Status_size",pointList.size());
for(int i=0;i<pointlist.size();i++) {="" medit1.remove("lat_"="" +="" i);="" medit1.putstring("lat_"="" i,pointlist.get(i).latitude+"");="" medit1.remove("lon_"="" medit1.putstring("lon_"="" i,pointlist.get(i).longitude+"");="" }="" return="" medit1.commit();="" @override="" protected="" void="" onresume()="" todo="" auto-generated="" method="" stub="" super.onresume();="" map_v.onresume();="" sm.registerlistener(acc,="" sensor.type_accelerometer="" ,="" sensormanager.sensor_delay_normal);="" acquirewakelock();="" if(latlng!="null)" drawrealtimepoint(latlng);="" *="" 讀取xml文件存儲數據;="" @param="" mcontext="" loadarray(context="" mcontext)="" sharedpreferences="" msharedpreference1="getSharedPreferences("lat"," context.mode_private);="" pointlist.clear();="" int="" size="mSharedPreference1.getInt("Status_size"," 0);="" for(int="" i="0;i=2 && pointList.size() <= 100000) {
// 添加路線(軌跡)
polyline = new PolylineOptions().width(10)
.color(Color.RED).points(pointList);
}
addMarker();
}
/*
* 添加地圖覆蓋物
*/
protected void addMarker() {
if (null != msUpdate) {
BaiDuMap.setMapStatus(msUpdate);
}
// 路線覆蓋物
if (null != polyline) {
BaiDuMap.addOverlay(polyline);
}
// 實時點覆蓋物
if (null != overlay) {
BaiDuMap.addOverlay(overlay);
}
//起點覆蓋物
if (null != StartOverlay) {
BaiDuMap.addOverlay(StartOverlay);
}
// 終點覆蓋物
if (null != EndOverlay) {
BaiDuMap.addOverlay(EndOverlay);
}
}
/*
*@author chenzheng_Java
*保存用戶輸入的內容到文件
*/
private void save(String content) {
try {
/* 根據用戶提供的文件名,以及文件的應用模式,打開一個輸出流.文件不存系統會為你創建一個的,
* 至於為什麼這個地方還有FileNotFoundException拋出,我也比較納悶。在Context中是這樣定義的
* public abstract FileOutputStream openFileOutput(String name, int mode)
* throws FileNotFoundException;
* openFileOutput(String name, int mode);
* 第一個參數,代表文件名稱,注意這裡的文件名稱不能包括任何的/或者/這種分隔符,只能是文件名
* 該文件會被保存在/data/data/應用名稱/files/chenzheng_java.txt
* 第二個參數,代表文件的操作模式
* MODE_PRIVATE 私有(只能創建它的應用訪問) 重復寫入時會文件覆蓋
* MODE_APPEND 私有 重復寫入時會在文件的末尾進行追加,而不是覆蓋掉原來的文件
* MODE_WORLD_READABLE 公用 可讀
* MODE_WORLD_WRITEABLE 公用 可讀寫
* */
content=content+"\n";
FileOutputStream outputStream = openFileOutput("Log.log",Activity.MODE_APPEND);
outputStream.write(content.getBytes());
outputStream.flush();
outputStream.close();
} catch (FileNotFoundException e) {
e.printStackTrace();
} catch (IOException e) {
e.printStackTrace();
}
}
/*
* 獲取系統時間
*/
private String getStringDate() {
Date currentTime = new Date();
SimpleDateFormat formatter = new SimpleDateFormat("yyyy-MM-dd HH:mm:ss");
String dateString = formatter.format(currentTime);
return dateString;
}
/*
* 判斷手機是否在運動
*/
private boolean IsMove(LatLng latLng,BDLocation location){
if(pointList.size()>=1){
Double dis=DistanceUtil.getDistance(pointList.get(pointList.size()-1),latLng);
//判斷手機是否靜止,如果靜止,判定采集點無效,直接拋棄
if(!acc.is_Acc&&acc.IsRun){
acc.IsRun=false;
return false;
}
//判斷是否是第一次定位置,如果是第一次定位並且因為第一次拋棄的位置數量小於10個則判斷兩點間距離大小
if(FLostLoc<10){
FLostLoc=FLostLoc+1;
if(dis>10&&FLostLoc<6){//距離大於十米,而且被拋棄數量少於5個則說明有可能是獲取位置失敗
pointList.clear();
pointList.add(latLng);//更新位置
return false;
}
if(dis>0&&dis<10&&FLostLoc>=6)//如果距離在10米內,則表示客戶正在運動,直接跳出
FLostLoc=11;
}
//根據兩點間距離判斷是否發生定位漂移,如果漂移距離小於MinDistance則拋棄,如果漂移距離大於MaxDistance則取兩點的中間點.
if(dis<=MinDistance){
if((dis<=MinDistance||dis>=MaxDistance)){
return false;
}
if(LostLoc>=4){
Double newlatitude=(latLng.latitude+pointList.get(pointList.size()-1).latitude)/2;
Double newlongitude=(latLng.longitude+pointList.get(pointList.size()-1).longitude)/2;
latLng = new LatLng(newlatitude, newlongitude);
}else{
LostLoc=LostLoc+1;
return false;
}
}
LostLoc=0;//重置丟失點的個數
// pointList.add(latLng);
acc.is_Acc=false;
}
pointList.add(latLng);
return true;
}
/*
* 開始規劃線路
*/
private void StartRoutePlan() {
// TODO Auto-generated method stub
progressDialog.setTitle("路線規劃");
progressDialog.setMessage("正在規劃路線請稍後。。");
progressDialog.show();
if(pointList!=null||pointList.size()>0)
pointList.clear();
PlanNode stNode = PlanNode.withLocation(ll);
StartOverlay=new MarkerOptions().position(ll)
.icon(StartBitmap).zIndex(9);
PlanNode enNode = PlanNode.withLocation(EndLL);
EndOverlay=new MarkerOptions().position(EndLL)
.icon(EndBitmap).zIndex(9);
mSearch.walkingSearch((new WalkingRoutePlanOption())
.from(stNode)
.to(enNode));
isGetRoute=true;
}
/*
* 獲取新路線
*/
private void IsGetNewRoute() {
// TODO Auto-generated method stub
AlertDialog.Builder builder = new Builder(this);
builder.setMessage("您已偏移路線,是否重新規劃路線?");
builder.setTitle("路線偏移");
builder.setPositiveButton("重新規劃", new OnClickListener() {
@Override
public void onClick(DialogInterface dialog, int which) {
StartRoutePlan();
dialog.dismiss();
}
});
builder.setNegativeButton("按原規劃", new OnClickListener() {
@Override
public void onClick(DialogInterface dialog, int which) {
dialog.dismiss();
}
});
builder.create().show();
isGetNewRoute=false;
}
/*
* 申請電源鎖
*/
private void acquireWakeLock() {
if (null == wakeLock) {
PowerManager pm = (PowerManager) getSystemService(Context.POWER_SERVICE);
wakeLock = pm.newWakeLock(PowerManager.PARTIAL_WAKE_LOCK | PowerManager.ON_AFTER_RELEASE,getClass().getName());
}
IntentFilter filter = new IntentFilter();
filter.addAction(Intent.ACTION_SCREEN_ON);
filter.addAction(Intent.ACTION_SCREEN_OFF);
registerReceiver(powerReceiver, filter);
}
/*
* 釋放電源鎖
*/
private void releaseWakeLock() {
unregisterReceiver(powerReceiver);
}
}
這裡貼出的代碼主要是完成電源鎖的開啟和撤銷
package com.example.baidutext;
import android.annotation.SuppressLint;
import android.content.BroadcastReceiver;
import android.content.Context;
import android.content.Intent;
public class PowerReceiver extends BroadcastReceiver {
@SuppressLint("Wakelock")
@Override
public void onReceive(final Context context, final Intent intent) {
final String action = intent.getAction();
//按下電源鍵,關閉屏幕
if (Intent.ACTION_SCREEN_OFF.equals(action)) {
System.out.println("screen off,acquire wake lock!");
if (null != MainActivity.wakeLock && !(MainActivity.wakeLock.isHeld())) {
MainActivity.wakeLock.acquire();
}
//按下電源鍵,打開屏幕
} else if (Intent.ACTION_SCREEN_ON.equals(action)) {
System.out.println("screen on,release wake lock!");
if (null != MainActivity.wakeLock && MainActivity.wakeLock.isHeld()) {
MainActivity.wakeLock.release();
}
}
}
}
這個文件主要是獲取加速感應器的值,然後通過波峰和波谷的插值,以及兩個波峰之間的時間差來判斷手機是否處於移動。關於詳細的大家可查找計步器原理。一下算法非本人原創,但是一直找不到原創作者,如作者本人看到,可與我聯系
package com.example.baidutext;
import android.hardware.Sensor;
import android.hardware.SensorListener;
/**
*根據加速度判斷手機是否處於靜止
* @author Administrator
*
*/
public class Acc implements SensorListener {
// /**
// * 手機加速度各方向狀態
// */
// private float F_Acc_x,F_Acc_y,F_Acc_z;
// /**
// * 上次獲取狀態時間
// */
// private long LastUpdateTime;
// /**
// * 兩次獲取狀態時間間隔單位(秒)
// */
// private final int UPTATE_INTERVAL_TIME = 1000*10;
//
/**
* 當前傳感器的值
*/
private float gravityNew = 0;
/**
* 上次傳感器的值
*/
private float gravityOld = 0;
/**
* 此次波峰的時間
*/
private long timeOfThisPeak = 0;
/**
* 上次波峰的時間
*/
private long timeOfLastPeak = 0;
/**
* 當前的時間
*/
private long timeOfNow = 0;;
/**
* 波峰值
*/
private float peakOfWave = 0;
/**
* 波谷值
*/
private float valleyOfWave = 0;
/**
* 初始阈值
*/
private float ThreadValue = (float) 2.0;
/**
* 動態阈值需要動態的數據,這個值用於這些動態數據的阈值
*/
private final float initialValue = (float) 1.3;
/**
* 上一點的狀態,上升還是下降
*/
private boolean lastStatus = false;
/**
* 是否上升的標志位
*/
private boolean isDirectionUp = false;
/**
* 持續上升次數
*/
private int continueUpCount = 0;
/**
* 上一點的持續上升的次數,為了記錄波峰的上升次數
*/
private int continueUpFormerCount = 0;
public boolean is_Acc=false;
// private int ACC=30;//手機感應器波動范圍,30以內判定手機處於靜止
private int tempCount = 0;
private final int valueNum = 4;
/**
* 用於存放計算阈值的波峰波谷差值
*/
private float[] tempValue = new float[valueNum];
/**
* 記錄波峰數量
*/
private int CountValue = 0;
/**
* 判斷傳感器是否在運行
*/
public boolean IsRun=false;
public Acc(){
// LastUpdateTime=System.currentTimeMillis();
}
@Override
public void onAccuracyChanged(int arg0, int arg1) {
// TODO Auto-generated method stub
}
/**
* 感應器狀態改變時自動調用此方法
*/
@Override
public void onSensorChanged(int arg0, float[] arg1) {
// TODO Auto-generated method stub
IsRun=true;
if(arg0==Sensor.TYPE_ACCELEROMETER){
// JIUjia(arg1);
gravityNew = (float) Math.sqrt(arg1[0] * arg1[0]
+ arg1[1] * arg1[1] + arg1[2] * arg1[2]);
DetectorNewStep(gravityNew);
}
}
// protected boolean JIUjia(float[] values) {
// if(F_Acc_x!=0){
// long currentUpdateTime = System.currentTimeMillis();
// long timeInterval = currentUpdateTime - LastUpdateTime;
// if(timeInterval < UPTATE_INTERVAL_TIME)
// return false;
// LastUpdateTime=currentUpdateTime;
// float tem0=values[0]-F_Acc_x;
// float tem1=values[1]-F_Acc_y;
// float tem2=values[2]-F_Acc_z;
// System.out.println(Math.abs(tem0)+","+Math.abs(tem1)+","+Math.abs(tem2));
// if(Math.abs(tem0)>ACC||Math.abs(tem1)>ACC||Math.abs(tem2)>ACC)
// is_Acc=true;
//
// }
// F_Acc_x=values[0];
// F_Acc_y=values[1];
// F_Acc_z=values[2];
// return is_Acc;
//
// }
/*
* 檢測步子
* 1.傳入sersor中的數據
* 2.如果檢測到了波峰,並且符合時間差以及阈值的條件,則判定為1步
* 3.符合時間差條件,波峰波谷差值大於initialValue,則將該差值納入阈值的計算中
* */
public void DetectorNewStep(float values) {
if (gravityOld == 0) {
gravityOld = values;
} else {
if (DetectorPeak(values, gravityOld)) {
timeOfLastPeak = timeOfThisPeak;
timeOfNow = System.currentTimeMillis();
if ((timeOfNow - timeOfLastPeak) >= 250&& (peakOfWave - valleyOfWave >= ThreadValue)) {
timeOfThisPeak = timeOfNow;
//兩步之間間隔大於4秒則不算
if((timeOfNow-timeOfLastPeak)>40000)
CountValue=0;
else
CountValue++;
//只有手機連續搖晃4下或者以上才判定為走路
if(CountValue>=4)
is_Acc=true;
// mStepListeners.onStep();
}
if (timeOfNow - timeOfLastPeak >= 250&& (peakOfWave - valleyOfWave >= initialValue)) {
timeOfThisPeak = timeOfNow;
ThreadValue = Peak_Valley_Thread(peakOfWave - valleyOfWave);
}
}
}
gravityOld = values;
}
/*
* 檢測波峰
* 以下四個條件判斷為波峰:
* 1.目前點為下降的趨勢:isDirectionUp為false
* 2.之前的點為上升的趨勢:lastStatus為true
* 3.到波峰為止,持續上升大於等於4次
* 4.波峰值大於20
* 記錄波谷值
* 1.觀察波形圖,可以發現在出現步子的地方,波谷的下一個就是波峰,有比較明顯的特征以及差值
* 2.所以要記錄每次的波谷值,為了和下次的波峰做對比
* */
public boolean DetectorPeak(float newValue, float oldValue) {
lastStatus = isDirectionUp;
if (newValue >= oldValue) {
isDirectionUp = true;
continueUpCount++;
} else {
continueUpFormerCount = continueUpCount;
continueUpCount = 0;
isDirectionUp = false;
}
if (!isDirectionUp && lastStatus&& (continueUpFormerCount >= 4 || oldValue >= 20&&oldValue<=40)) {
peakOfWave = oldValue;
return true;
} else if (!lastStatus && isDirectionUp) {
valleyOfWave = oldValue;
return false;
} else {
return false;
}
}
/*
* 阈值的計算
* 1.通過波峰波谷的差值計算阈值
* 2.記錄4個值,存入tempValue[]數組中
* 3.在將數組傳入函數averageValue中計算阈值
* */
public float Peak_Valley_Thread(float value) {
float tempThread = ThreadValue;
if (tempCount < valueNum) {
tempValue[tempCount] = value;
tempCount++;
} else {
tempThread = averageValue(tempValue, valueNum);
for (int i = 1; i < valueNum; i++) {
tempValue[i - 1] = tempValue[i];
}
tempValue[valueNum - 1] = value;
}
return tempThread;
}
/*
* 梯度化阈值
* 1.計算數組的均值
* 2.通過均值將阈值梯度化在一個范圍裡
* */
public float averageValue(float value[], int n) {
float ave = 0;
for (int i = 0; i < n; i++) {
ave += value[i];
}
ave = ave / valueNum;
if (ave >= 8)
ave = (float) 4.3;
else if (ave >= 7 && ave < 8)
ave = (float) 3.3;
else if (ave >= 4 && ave < 7)
ave = (float) 2.3;
else if (ave >= 3 && ave < 4)
ave = (float) 2.0;
else {
ave = (float) 1.3;
}
return ave;
}
}
至此就全部結束了,各位如有其他問題可直接留言給我。
 如何判斷軟件程序是否聯網 聯網狀態提示信息Android實現
如何判斷軟件程序是否聯網 聯網狀態提示信息Android實現
在項目中,經常需要判斷是否有網絡連接。最近學習了如何判斷軟件是否聯網,如果沒有聯網,彈出提示信息,連接網絡。效果:(1)聯網情況下: (2)不聯網情況下:(3)
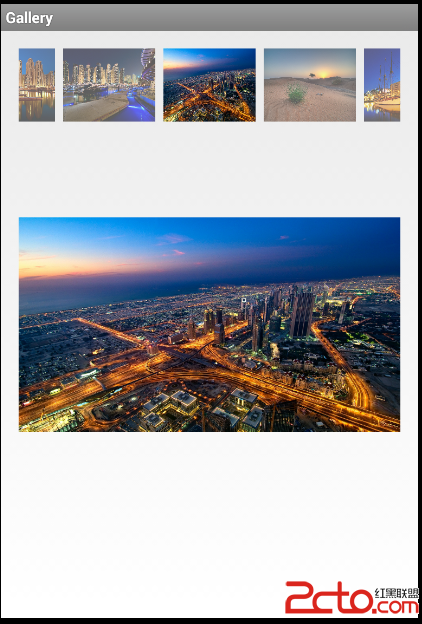 Android中Gallery和ImageSwitcher的使用
Android中Gallery和ImageSwitcher的使用
效果如下:布局文件activity_main.xml如下: MainActivity.java代碼如下:import android.app.Act
 詳解Android Material Design自定義動畫的編寫
詳解Android Material Design自定義動畫的編寫
新的動畫Api,讓你在UI控件裡能創建觸摸反饋,改變View的狀態,切換activity的一系列自定義動畫具體有: 響應View的touch事件的觸摸反饋動畫 隱藏和
 Android 中構建快速可靠的 UI 測試
Android 中構建快速可靠的 UI 測試
前言讓我一起來看看 Iván Carballo和他的團隊是如何使用Espresso, Mockito 和Dagger 2 編寫250個UI測試,並且只花了三分鐘就運行成功