編輯:關於Android編程
Motion Sensors
Android平台提供了多種感應器,讓你監控設備的運動。這些傳感器的兩個總是基於硬件的(加速度計和陀螺儀),並且可以要麼基於硬件或基於軟件的這三個傳感器(重力,線性加速度和旋轉矢量傳感器)。例如,在某些設備上的基於軟件的傳感器從加速度計和磁力計獲得它們的數據,但在其他裝置也可以使用陀螺儀來導出他們的數據。大多數Android設備有一個加速度計,現在許多人包括陀螺儀。基於軟件的傳感器的可用性是更加可變的,因為它們通常依賴於一個或一個以上硬件傳感器來導出他們的數據。
運動傳感器用於監視設備的運動,比如傾斜,搖動,旋轉或搖擺有用。運動通常是直接用戶輸入的反射(例如,用戶在游戲或控制在游戲中球的用戶操縱汽車),但它也可以是在該裝置所坐的物理環境的反射(例如,與你動,而你開你的車)。在第一種情況下,您正在監視相對於參考設備的框架或引用您的應用程序框架的議案;在第二種情況下,你正在監測相對於參考世界幀運動。本身運動傳感器通常不用於監控設備的位置,但它們可以與其他傳感器,例如地磁場傳感器中使用,以確定設備的相對於參考世界幀位置(更多信息參見位置傳感器)。
所有的運動傳感器返回傳感器值的多維數組每個SensorEvent。例如,一個單一的傳感器事件期間加速度返回加速度力數據為三個坐標軸,和陀螺儀返回旋轉數據的速率為三個坐標軸。這些數據值與其他SensorEvent參數一起float數組(值)返回。表1總結了可用的Andr??oid平台上的運動傳感器。
所支持的Andr??oid平台上表1.運動傳感器。
傳感器傳感器事件數據說明測量單位
TYPE_ACCELEROMETER SensorEvent.values?? [0]沿x軸(包括重力)加速力。米/秒2
沿y軸(包括重力)SensorEvent.values?? [1]加速力。
沿z軸(包括重力)SensorEvent.values?? [2]加速力。
TYPE_GRAVITY SensorEvent.values?? [0]沿x軸的重力的力。米/秒2
SensorEvent.values?? [1]沿y軸的重力的力。
SensorEvent.values?? [2]沿著z軸的重力的力。
TYPE_GYROSCOPE SensorEvent.values?? [0]速率圍繞x軸的旋轉。弧度/秒
SensorEvent.values?? [1]速率繞y軸的旋轉。
SensorEvent.values?? [2]速率圍繞z軸的旋轉。
型陀螺儀無標定傳感器Event.values?? [0]速率旋轉(無漂移補償)的繞x軸。弧度/秒
SensorEvent.values?? [1]速率繞y軸的旋轉(無漂移補償)的。
SensorEvent.values?? [2]速率圍繞z軸的旋轉(無漂移補償)的。
SensorEvent.values?? [3]圍繞x軸的估計漂移。
SensorEvent.values?? [4]繞y軸的估計漂移。
SensorEvent.values?? [5]圍繞z軸的估計漂移。
TYPE_LINEAR_ACCELERATION SensorEvent.values?? [0]沿x軸(不包括重力)加速力。米/秒2
SensorEvent.values?? [1]加速沿y軸(不包括重力)的力。
沿z軸(不包括重力)SensorEvent.values?? [2]加速力。
沿x軸TYPE_ROTATION_VECTOR SensorEvent.values?? [0]旋轉矢量分量(X * SIN(θ/ 2))。無單位
沿y軸(y * SIN(θ/ 2))SensorEvent.values?? [1]旋轉矢量分量。
沿z軸SensorEvent.values?? [2]旋轉矢量成分(Z * SIN(θ/ 2))。
旋轉向量的SensorEvent.values?? [3]標量成分((COS(θ/ 2))。1
TYPE_SIGNIFICANT_MOTION N / A N / A N / A
TYPE_STEP_COUNTER SensorEvent.values?? [0],而傳感器被激活自上次重啟用戶采取步數。腳步
TYPE_STEP_DETECTOR N / A N / A N / A
1標量分量是可選的值。
旋轉矢量傳感器和重力傳感器是用於運動檢測和監測中最常用的傳感器。旋轉矢量傳感器是特別通用,可用於廣泛范圍的運動相關的任務,如檢測的手勢,監測的角度變化,和監測的相對定向的改變。例如,如果你正在開發一個游戲,增強現實應用,二維或三維羅盤,或相機穩定應用的旋轉矢量傳感器是理想的。在大多數情況下,使用這些傳感器比使用加速度計和地磁傳感器或方位傳感器更好的選擇。
Android開源項目的傳感器
Android開源項目(AOSP)提供了三個基於軟件的運動傳感器:重力傳感器,線性加速度傳感器和旋轉矢量傳感器。這些傳感器中的Andr??oid 4.0更新和現在使用的裝置的陀螺儀(除了其他傳感器),以改善穩定性和性能。如果你想嘗試這些傳感器,可以通過使用getVendor()方法和getVersion()方法識別它們(供應商是谷歌公司;版本號為3)。由供應商和版本號識別這些傳感器是必要的,因為Android系統認為這些三個傳感器是次要傳感器。例如,如果一個設備制造商提供了其自身的重力傳感器,則AOSP重力傳感器示出了作為輔助重力傳感器。所有這三個傳感器依靠一個陀螺儀:如果一個裝置不具有一個陀螺儀,這些傳感器沒有顯示出來,並且不能使用。
使用加速度計
加速度傳感器測量施加到該裝置的加速度,包括重力的力。下面的代碼展示了如何獲得默認加速度傳感器的一個實例:
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);概念上,加速度傳感器確定是通過測量被施加到使用以下關系傳感器本身(FS)的力施加到一個裝置(廣告)的加速度:
public void onSensorChanged(SensorEvent event){
// In this example, alpha is calculated as t / (t + dT),
// where t is the low-pass filter's time-constant and
// dT is the event delivery rate.
final float alpha = 0.8;
// Isolate the force of gravity with the low-pass filter.
gravity[0] = alpha * gravity[0] + (1 - alpha) * event.values[0];
gravity[1] = alpha * gravity[1] + (1 - alpha) * event.values[1];
gravity[2] = alpha * gravity[2] + (1 - alpha) * event.values[2];
// Remove the gravity contribution with the high-pass filter.
linear_acceleration[0] = event.values[0] - gravity[0];
linear_acceleration[1] = event.values[1] - gravity[1];
linear_acceleration[2] = event.values[2] - gravity[2];
}
注意:您可以使用許多不同的技術來過濾傳感器數據。上面的代碼示例使用一個簡單的過濾器常數(阿爾法)來創建一個低通濾波器。此濾波器常數從一個時間常數(t)的,它是延遲的粗略表示該濾波器增加了傳感器事件,並且傳感器的事件傳遞率(DT)的。該代碼示例使用的0.8用於演示的alpha值。如果使用這種過濾方法可能需要選擇不同的alpha值。
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_GRAVITY);單位是相同的那些由加速度傳感器(米/秒2)中使用,和坐標系是與由加速度傳感器所使用的。
陀螺儀測量圍繞一個設備的x,y和z軸中弧度/秒的速率或旋轉。下面的代碼展示了如何獲得默認陀螺儀的實例:
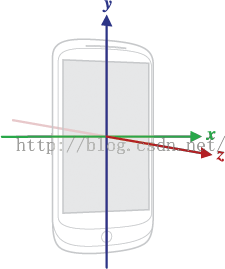
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE);傳感器的坐標系中是一樣的用於加速度傳感器中之一。旋轉是在反時針方向陽性;即,從在x一些積極的位置看的觀察者,在定位在原點的裝置y或z軸方向會如果設備出現逆時針方向被旋轉報告正轉。這是正轉的標准的數學定義,是不一樣的是,用於由方位傳感器的定義為輥。
// Create a constant to convert nanoseconds to seconds.
private static final float NS2S = 1.0f / 1000000000.0f;
private final float[] deltaRotationVector = new float[4]();
private float timestamp;
public void onSensorChanged(SensorEvent event) {
// This timestep's delta rotation to be multiplied by the current rotation
// after computing it from the gyro sample data.
if (timestamp != 0) {
final float dT = (event.timestamp - timestamp) * NS2S;
// Axis of the rotation sample, not normalized yet.
float axisX = event.values[0];
float axisY = event.values[1];
float axisZ = event.values[2];
// Calculate the angular speed of the sample
float omegaMagnitude = sqrt(axisX*axisX + axisY*axisY + axisZ*axisZ);
// Normalize the rotation vector if it's big enough to get the axis
// (that is, EPSILON should represent your maximum allowable margin of error)
if (omegaMagnitude > EPSILON) {
axisX /= omegaMagnitude;
axisY /= omegaMagnitude;
axisZ /= omegaMagnitude;
}
// Integrate around this axis with the angular speed by the timestep
// in order to get a delta rotation from this sample over the timestep
// We will convert this axis-angle representation of the delta rotation
// into a quaternion before turning it into the rotation matrix.
float thetaOverTwo = omegaMagnitude * dT / 2.0f;
float sinThetaOverTwo = sin(thetaOverTwo);
float cosThetaOverTwo = cos(thetaOverTwo);
deltaRotationVector[0] = sinThetaOverTwo * axisX;
deltaRotationVector[1] = sinThetaOverTwo * axisY;
deltaRotationVector[2] = sinThetaOverTwo * axisZ;
deltaRotationVector[3] = cosThetaOverTwo;
}
timestamp = event.timestamp;
float[] deltaRotationMatrix = new float[9];
SensorManager.getRotationMatrixFromVector(deltaRotationMatrix, deltaRotationVector);
// User code should concatenate the delta rotation we computed with the current rotation
// in order to get the updated rotation.
// rotationCurrent = rotationCurrent * deltaRotationMatrix;
}
}
標准陀螺儀提供沒有經過任何過濾或更正噪聲和漂移(偏差)的原始數據旋轉。在實踐中,陀螺儀的噪聲和漂移將引入需要被補償的誤差。通常你確定通過監控其它傳感器,如重力傳感器或加速度計的漂移(偏差)和噪音。
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE_UNCALIBRATED);
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_LINEAR_ACCELERATION);概念上,該傳感器根據以下的關系提供了加速度數據:
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ROTATION_VECTOR);旋轉矢量的三個元素表示如下:
x*sin(θ/2) y*sin(θ/2) z*sin(θ/2)於旋轉軸的方向。
private SensorManager mSensorManager;
private Sensor mSensor;
private TriggerEventListener mTriggerEventListener;
...
mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_SIGNIFICANT_MOTION);
mTriggerEventListener = new TriggerEventListener() {
@Override
public void onTrigger(TriggerEvent event) {
// Do work
}
};
mSensorManager.requestTriggerSensor(mTriggerEventListener, mSensor);
欲了解更多信息,請參見觸發事件偵聽器。
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_STEP_COUNTER);使用步驟檢測儀傳感器
private SensorManager mSensorManager; private Sensor mSensor; ... mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_STEP_DETECTOR);
 Android開發學習之路--網絡編程之xml、json
Android開發學習之路--網絡編程之xml、json
一般網絡數據通過http來get,post,那麼其中的數據不可能雜亂無章,比如我要post一段數據,肯定是要有一定的格式,協議的。常用的就是xml和json了。在此先要搭
 《Android 開發入門》Android Studio 下載及安裝
《Android 開發入門》Android Studio 下載及安裝
android 開發工具主流的還是Android Studio,當然也有很多人喜歡用Eclipse,也有人喜歡用IntelliJ IDEA ;還有Xamarin這種只需要
 Android編程實現屏幕自適應方向尺寸與分辨率的方法
Android編程實現屏幕自適應方向尺寸與分辨率的方法
本文實例講述了Android編程實現屏幕自適應方向尺寸與分辨率的方法。分享給大家供大家參考,具體如下:Android 屏幕自適應方向尺寸與分辨率,包括屏幕界面布局、多分辨
 Android中庫項目的使用方法圖文介紹
Android中庫項目的使用方法圖文介紹
在軟件開發過程中,程序代碼的復用,是非常重要的概念。我們總是需要使用一些現有的模塊、包、框架,或開發自己的模塊、包、框架,來實現對程序代碼的復用。比如在JavaWeb編程