編輯:關於Android編程
內核空間:利用內核中現有的GPIO驅動輸出高低電平,使用內核軟中斷防止模擬時序時被中斷導致延時誤差大;GPIO設備讀取數據後引發軟中斷產生模擬IR。
代碼:
1. .h文件中的數據結構以及宏定義
struct IR_CODE
{
U16 uHead;
U8 uScancode;
U8 bOutreverse;
};
typedef struct GPIO_Reg GPIO_Reg_t;
typedef struct IR_CODE IR_CODE_t;
//add by yanxi for ir out start 140117
#define IR_HEAD0 0
#define IR_HEAD1 1
#define IR_TIME_BASE 2
#define IR_CODE_0 3
#define IR_CODE_1 4
#define IR_CODE_END 5
//38k = 26.315us
#define TIMER_9000US 342
#define TIMER_4500US 171
#define TIMER_560US 21
#define TIMER_1680US 63
//add by yanxi for ir out end 1401172.當用戶空間寫數據到設備節點時, _MDrv_GPIO_Write被執行,通過copy_from_user 獲取IR數據,並使用_MDrv_GPIO_SendIR發送IR
static ssize_t _MDrv_GPIO_Write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos)
{
IR_CODE_t mIR_CODE_t;
GPIO_PRINT("%s is invoked\n", __FUNCTION__);
copy_from_user(&mIR_CODE_t, (IR_CODE_t __user *) buf, sizeof(IR_CODE_t));
printk("\n yanxidebug uHead:%x uScancode:%x bOutreverse:%d",mIR_CODE_t.uHead,mIR_CODE_t.uScancode,mIR_CODE_t.bOutreverse);
_MDrv_GPIO_SendIR((unsigned int)mIR_CODE_t.uHead,(unsigned int)mIR_CODE_t.uScancode,(BOOL)mIR_CODE_t.bOutreverse);
return 0;
}
static void _MDrv_GPIO_SendIR(unsigned int Head, int scancode, BOOL bOutreverse)
{
GPIO_PRINT("\n %s Head:%d scancode:%d bOutreverse:%d\n", __FUNCTION__,Head,scancode,bOutreverse);
mHead = Head;
mscancode = scancode;
mbOutreverse = bOutreverse;
raise_softirq(SENDIR_SOFTIRQ);
} int irq_handle_function(int irq, void *device_id)
{
GPIO_PRINT("\n %s \n", __FUNCTION__);
S8 TranselateBitPos;
U8 Ir_trans_sta;
int mcount = 0;
unsigned int head = 0x007f;
U8 head0 = head >> 8;
U8 head1 = head &0x00ff;
U16 mkeycode = mscancode;
BOOL outreverse = true;
//init state
Ir_trans_sta=IR_HEAD0;
TranselateBitPos=32;
//send ir code
while(TranselateBitPos>=0)
{
mcount = 0;
switch(Ir_trans_sta)
{
case IR_HEAD0:
Ir_trans_sta= IR_HEAD1;
if(outreverse)
{
mcount = TIMER_9000US;
}
else
{
MHal_GPIO_Set_Low(0);
mdelay(9);
}
break;
case IR_HEAD1:
Ir_trans_sta= IR_TIME_BASE;
if(!outreverse)//outreverse true
{
mcount = TIMER_4500US;//output high ;38k
}
else
{
MHal_GPIO_Set_High(0);//outreverse false,low vol
mdelay(4);
udelay(500);
}
break;
case IR_TIME_BASE:
if(TranselateBitPos>24)
{
if( ((head0>>(32-TranselateBitPos)) & 0x1) == 0x1 )
Ir_trans_sta= IR_CODE_1;
else
Ir_trans_sta= IR_CODE_0;
}
else if(TranselateBitPos>16)
{
if( ((head1>>(24-TranselateBitPos)) & 0x1) == 0x1 )
Ir_trans_sta= IR_CODE_1;
else
Ir_trans_sta= IR_CODE_0;
}
else if(TranselateBitPos>8)
{
if( ((mkeycode>>(16-TranselateBitPos))&0x1) == 0x1 ){
Ir_trans_sta= IR_CODE_1;
}
else {
Ir_trans_sta= IR_CODE_0;
}
}
else if(TranselateBitPos>0)
{
if( ((mkeycode>>(8-TranselateBitPos))&0x1) == 0x1 )
Ir_trans_sta= IR_CODE_0;
else
Ir_trans_sta= IR_CODE_1;
}
else
{
Ir_trans_sta= IR_CODE_END;
}
if(!outreverse)
{
MHal_GPIO_Set_Low(0);
udelay(560);
}
else
{
mcount = TIMER_560US;
}
break;
case IR_CODE_0:
Ir_trans_sta= IR_TIME_BASE;
if(outreverse)
{
MHal_GPIO_Set_Low(0);
udelay(500);
}
else
{
mcount = TIMER_560US;
}
TranselateBitPos--;
break;
case IR_CODE_1:
Ir_trans_sta= IR_TIME_BASE;
if(outreverse)
{
MHal_GPIO_Set_Low(0);
udelay(1680);
}
else
{
mcount = TIMER_1680US;
}
TranselateBitPos--;
break;
case IR_CODE_END:
Ir_trans_sta= IR_HEAD0;
MHal_GPIO_Set_High(0);
TranselateBitPos=-1;//force to exit.
break;
default:break;
}
//38k generate
while(mcount-- > 0){
MHal_GPIO_Set_High(0);
MHal_GPIO_Set_High(0);
MHal_GPIO_Set_High(0);
MHal_GPIO_Set_High(0);
udelay(11);
MHal_GPIO_Set_Low(0);
MHal_GPIO_Set_Low(0);
MHal_GPIO_Set_Low(0);
MHal_GPIO_Set_Low(0);
udelay(11);
}
}
return IRQ_NONE;
}
完...  Android布局與CSS的Flex布局的對應關系
Android布局與CSS的Flex布局的對應關系
一、前言作為一個android開發者,使用xml寫UI,實在是太方便了。最近學習Weex,需要使用css來布局。學成之後,發現使用CSS的Flex布局樣式也非常方便。在c
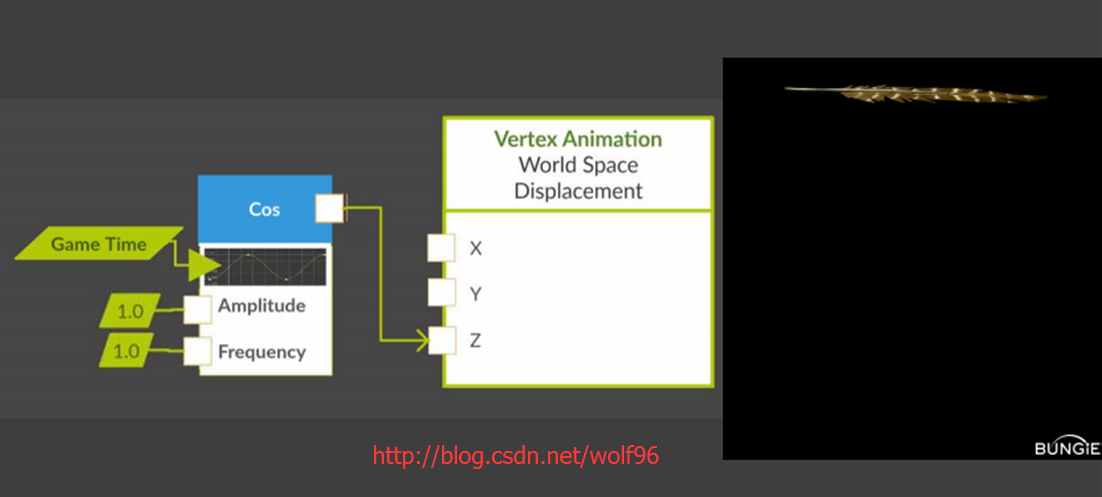 Unity3d 實現頂點動畫
Unity3d 實現頂點動畫
在今年GDC上發現一個非常有趣的演講,叫做Animating With Math,遂實現之,是講述頂點shader動畫的,舉了幾個經典的例子,但是講者並沒有給代碼,而是像
 Android自定義加載控件實現數據加載動畫
Android自定義加載控件實現數據加載動畫
本文實例為大家分享了Android自定義加載控件,第一次小人跑動的加載效果眼前一亮,相比傳統的PrograssBar高大上不止一點,於是走起,自定義了控件LoadingV
 使用android SpannableStringBuilder實現圖文混排,查看更多
使用android SpannableStringBuilder實現圖文混排,查看更多
項目開發中需要實現這種效果 多余兩行,兩行最後是省略號,省略號後面是下拉更多 之前用過的是Html.fromHtml去處理圖文混排的,僅僅是文字後圖片或者文字顏色字