其實在網上講Property的文章還是蠻多的,不過源碼級分析的倒是不多,曉東正好做好了一個項目,其中涉及到了Property的一些內容,折騰了一段時間,心想不如來讀讀源碼,看看究竟是怎麼回事。
1、property內存區域的申請
在網上通常都是這樣開始講的“屬性服務運行於init進程中。init進程首先創建一個共享內存區域,並保存一個指向該區域的描述符fd。”[1]這一段從代碼中如何來看呢,首先找到init的main函數:(system/core/init/init.c文件中),有這樣一句話:
queue_builtin_action(property_init_action, "property_init");
大概的意思就是把property_init_action加入到action queue中,後面會來調用這個action。所以,我們自然而然的就會去看property_init_action的操作:
[cpp]
static int property_init_action(int nargs, char **args)
{
bool load_defaults = true;
INFO("property init\n");
//只要不是關機充電的模式,我們都把load_defaults置為true
if (!strcmp(bootmode, "charger"))
load_defaults = false;
//property的初始化
property_init(load_defaults);
return 0;
}
void property_init(bool load_defaults)
{
//初始化property的內存區域,就是上面傳說的共享內存區域?
init_property_area();
//若是需要load,這裡會load PROP_PATH_RAMDISK_DEFAULT
// #define PROP_PATH_RAMDISK_DEFAULT "/default.prop"
<span style="color:#000000;">//所以網上盛傳的先加載哪個文件,再加載哪個文件都是有前提的,就是首先不是在關機充電模式。哈哈~~,不過的確是得先加載這個文件default.prop
if (load_defaults)
</span>//這裡加載對應文件中的property內容,詳細分析見1.2
load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT);
}
static int init_property_area(void)
{
prop_area *pa;
//這是個全局變量,不過也就只有這個函數會賦值,所以開始不會有問題,再重復進來就會報錯了
if(pa_info_array)
return -1;
//初始化內存區域,詳細分析見1.1
if(init_workspace(&pa_workspace, PA_SIZE))
return -1;
//設置FD_CLOEXEC,大概的意思就是在excel執行時關閉
fcntl(pa_workspace.fd, F_SETFD, FD_CLOEXEC);
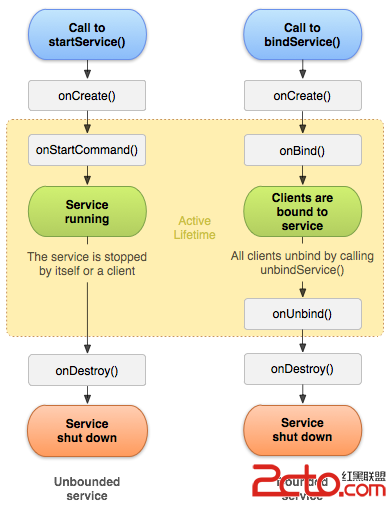
//這裡如圖1所示
pa_info_array = (void*) (((char*) pa_workspace.data) + PA_INFO_START);
pa = pa_workspace.data;
//把整個shared memory都初始化為0
memset(pa, 0, PA_SIZE);
//設置magic和version
pa->magic = PROP_AREA_MAGIC;
pa->version = PROP_AREA_VERSION;
/* plug into the lib property services */
//這裡把__system_property_area__也指過去了
__system_property_area__ = pa;
//設置inited的狀態位
property_area_inited = 1;
return 0;
}
圖1 property內存區域示意圖[1]
1.1 共享內存區域的初始化
[cpp]
static int init_workspace(workspace *w, size_t size)
{
void *data;
int fd;
/* dev is a tmpfs that we can use to carve a shared workspace
* out of, so let's do that...
*/
//其實就是打開__properties__的設備節點。這個就是在內核中實現的了,具體的分析曉東有機會再和大家一起分析
fd = open("/dev/__properties__", O_RDWR | O_CREAT, 0600);
if (fd < 0)
return -1;
//改變文件的大小為size
if (ftruncate(fd, size) < 0)
goto out;
<span style="color:#000000;">//這裡實現的就是“init進程將該區域通過使用了MAP_SHARED標志的mmap映射至它自身的虛擬地址空間,這樣,任何對於該區域的更新對於所有進程都是可見的[1]”
</span> data = mmap(NULL, size, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if(data == MAP_FAILED)
goto out;
close(fd);
//重新打開為readonly
fd = open("/dev/__properties__", O_RDONLY);
if (fd < 0)
return -1;
//remove this for BLCR
//unlink("/dev/__properties__");
//這裡賦值data,size和fd參數
w->data = data;
w->size = size;
w->fd = fd;
return 0;
out:
close(fd);
return -1;
}
1.2 以default.prop為例詳解property文件的加載
假設一個default.prop的文件內容如下:
[plain]
#
# ADDITIONAL_DEFAULT_PROPERTIES
#
ro.secure=1
ro.allow.mock.location=0
ro.debuggable=1
persist.sys.usb.config=mtp,adb
[cpp]
static void load_properties_from_file(const char *fn)
{
char *data;
unsigned sz;
//讀出文件中的內容,保存到data所指向的一段內存中,size是sz
data = read_file(fn, &sz);
if(data != 0) {
//加載對應的value key對
load_properties(data);
free(data);
}
}
static void load_properties(char *data)
{
char *key, *value, *eol, *sol, *tmp;
sol = data;
//這個while循環就是一個key和value的解析過程了,大概的意思就是把=號前的保存到key中,把=號後的內容保存到value中
while((eol = strchr(sol, '\n'))) {
key = sol;
*eol++ = 0;
sol = eol;
value = strchr(key, '=');
if(value == 0) continue;
*value++ = 0;
while(isspace(*key)) key++;
if(*key == '#') continue;
tmp = value - 2;
while((tmp > key) && isspace(*tmp)) *tmp-- = 0;
while(isspace(*value)) value++;
tmp = eol - 2;
while((tmp > value) && isspace(*tmp)) *tmp-- = 0;
//這裡是關鍵的設置
property_set(key, value);
}
}
<span style="color:#000000;">//提醒一下,這裡的property_set和我們真正調用的property_set可不是一回事哦,當然最終我們仍然會調用到這個函數。具體見最後的分析
</span>int property_set(const char *name, const char *value)
{
prop_area *pa;
prop_info *pi;
//得到name和value的長度
int namelen = strlen(name);
int valuelen = strlen(value);
<span style="color:#000000;">//這裡property的name和value都是有最大長度的哦,name是32,value是92,所以大家在寫自己的name和value的時候,不要超過這個長度哦
</span> if(namelen >= PROP_NAME_MAX) return -1;
if(valuelen >= PROP_VALUE_MAX) return -1;
if(namelen < 1) return -1;
//去prop_info中找一下是否已經有了同名的
pi = (prop_info*) __system_property_find(name);
if(pi != 0) {
//若是有這個name,假如是以ro開頭,則不修改,直接返回
/* ro.* properties may NEVER be modified once set */
if(!strncmp(name, "ro.", 3)) return -1;
//否則就需要update新的value
pa = __system_property_area__;
update_prop_info(pi, value, valuelen);
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
} else {
pa = __system_property_area__;
//首先看一下pa的count是不是已經到max了
if(pa->count == PA_COUNT_MAX) return -1;
//這裡知道後面的pa_info,然後保存對應的name和value
pi = pa_info_array + pa->count;
pi->serial = (valuelen << 24);
memcpy(pi->name, name, namelen + 1);
memcpy(pi->value, value, valuelen + 1);
pa->toc[pa->count] =
(namelen << 24) | (((unsigned) pi) - ((unsigned) pa));
//count++
pa->count++;
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}
/* If name starts with "net." treat as a DNS property. */
//若是以net.開頭的,把它作為一個DNS的property
if (strncmp("net.", name, strlen("net.")) == 0) {
if (strcmp("net.change", name) == 0) {
return 0;
}
/*
* The 'net.change' property is a special property used track when any
* 'net.*' property name is updated. It is _ONLY_ updated here. Its value
* contains the last updated 'net.*' property.
*/
//同時需要改變net.change的值,net.change本身就在上面直接返回了
property_set("net.change", name);
} else if (persistent_properties_loaded &&
strncmp("persist.", name, strlen("persist.")) == 0) {
/*
* Don't write properties to disk until after we have read all default properties
* to prevent them from being overwritten by default values.
*/
//先寫到temp文件中,暫時不要寫到disk
write_persistent_property(name, value);
}
property_changed(name, value);
return 0;
}
void property_changed(const char *name, const char *value)
{
//這個參數會在queue_property_triggers_action中調用,目前還是沒有設置的,所以就先這樣
if (property_triggers_enabled)
queue_property_triggers(name, value);
}
總得來說property_init_action就是申請共享內存區域,然後load default.prop文件。
2、"set_init_properties"設置初始化的property
在property_init_action之後和property相關的就是set_init_properties_action了
queue_builtin_action(set_init_properties_action, "set_init_properties");
所以我們接著來分析這個函數:
[cpp]
static int set_init_properties_action(int nargs, char **args)
{
char tmp[PROP_VALUE_MAX];
//得到kernel的cmd line的參數
if (qemu[0])
import_kernel_cmdline(1, import_kernel_nv);
//若是工廠模式,設幾個ro的property,有人說這裡是ro的參數,不能只讀不能改嗎,哈哈,你若是仔細看了前面的property_set的函數就會發現,其實這裡若是第一次,還是可以寫的,相當於初始化後就不能改了。
if (!strcmp(bootmode,"factory"))
property_set("ro.factorytest", "1");
else if (!strcmp(bootmode,"factory2"))
property_set("ro.factorytest", "2");
else
property_set("ro.factorytest", "0");
//設置下面這些ro參數的值
property_set("ro.serialno", serialno[0] ? serialno : "");
property_set("ro.bootmode", bootmode[0] ? bootmode : "unknown");
property_set("ro.baseband", baseband[0] ? baseband : "unknown");
property_set("ro.carrier", carrier[0] ? carrier : "unknown");
property_set("ro.bootloader", bootloader[0] ? bootloader : "unknown");
property_set("ro.hardware", hardware);
snprintf(tmp, PROP_VALUE_MAX, "%d", revision);
property_set("ro.revision", tmp);
return 0;
}
這個函數就是根據kernel的cmdline參數等設置對應的一些ro參數的值,和我們的關系不是很大,知道就可以了。
3、property_service_init_action之初始化property service
這個action就是緊接著上面的一些操作了:
queue_builtin_action(property_service_init_action, "property_service_init");
該函數就是初始化property service
[cpp]
static int property_service_init_action(int nargs, char **args)
{
/* read any property files on system or data and
* fire up the property service. This must happen
* after the ro.foo properties are set above so
* that /data/local.prop cannot interfere with them.
*/
//啟動property的service
start_property_service();
return 0;
}
void start_property_service(void)
{
int fd;
<span style="color:#000000;">//加載下面三個文件:"/system/build.prop","/system/default.prop",/data/local.prop"。
//這裡就是網上流傳的4個文件的加載順序的說法,從這裡就可以看到了。
</span> load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
load_properties_from_file(PROP_PATH_LOCAL_OVERRIDE);
/* Read persistent properties after all default values have been loaded. */
//這裡就是所有的default 值都初始化好了,就加載persistent的property了,還記得前面我們把persisten的property寫到一個文件中去的麼?這裡就再從裡面讀出來好了
load_persistent_properties();
//創建一個socket,這裡就是盛傳的“在這一步中,一個unix domain socket服務被創建”[1]
fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
if(fd < 0) return;
fcntl(fd, F_SETFD, FD_CLOEXEC);
fcntl(fd, F_SETFL, O_NONBLOCK);
//這裡是listen了
listen(fd, 8);
//賦值給property_set_fd
property_set_fd = fd;
}
這裡主要的工作就是啟動property service,加載了剩下的三個文件,同時新建了一個socket,並且監聽了他的內容。我想下面的內容就可以猜到了,就是對這個socket的數據進行處理了。
4、socket有數據後的處理
在init.c的最後會有一個循環,用來不停的處理它所監聽的socket。代碼如下:
[cpp]
for(;;){
……
//若是property fd那邊有數據,就處理這邊的數據
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
……
}
void handle_property_set_fd()
{
prop_msg msg;
int s;
int r;
int res;
struct ucred cr;
struct sockaddr_un addr;
socklen_t addr_size = sizeof(addr);
socklen_t cr_size = sizeof(cr);
//accept數據
if ((s = accept(property_set_fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
//得到socket的options
/* Check socket options here */
if (getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
close(s);
ERROR("Unable to recieve socket options\n");
return;
}
//recv數據
r = TEMP_FAILURE_RETRY(recv(s, &msg, sizeof(msg), 0));
if(r != sizeof(prop_msg)) {
ERROR("sys_prop: mis-match msg size recieved: %d expected: %d errno: %d\n",
r, sizeof(prop_msg), errno);
close(s);
return;
switch(msg.cmd) {
<span style="color:#000000;">//這裡就是處理我們調用的property_set了,所以,理解了吧,我們調用property_set的時候,其實就是通過socket發送這個msg過來而已。
</span> case PROP_MSG_SETPROP:
//得到對應的name和value值
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
//這裡處理ctl.start,ctl.stop等等
if(memcmp(msg.name,"ctl.",4) == 0) {
// Keep the old close-socket-early behavior when handling
// ctl.* properties.
close(s);
//檢查value對應的uid和gid,若是root或者system就可以直接處理,而不需要檢查,這就是官大的好處理問題啊。哈哈~~
if (check_control_perms(msg.value, cr.uid, cr.gid)) {
//根據start,stop還是restart來進行service的對應的處理,我們就不詳細關注了哦
handle_control_message((char*) msg.name + 4, (char*) msg.value);
} else {
ERROR("sys_prop: Unable to %s service ctl [%s] uid:%d gid:%d pid:%d\n",
msg.name + 4, msg.value, cr.uid, cr.gid, cr.pid);
}
} else {
//這裡同樣會check permission,不同的是system沒有特權了,只有root才有特權
if (check_perms(msg.name, cr.uid, cr.gid)) {
//然後進行設置
property_set((char*) msg.name, (char*) msg.value);
} else {
ERROR("sys_prop: permission denied uid:%d name:%s\n",
cr.uid, msg.name);
}
//這裡就是和bionic 那邊進行通信的,就是寫好了,這裡關閉。然後bionic那邊進行監聽。這裡有個問題,就是我們若是找不到name,那邊也會認為是正確的,被害死了
// Note: bionic's property client code assumes that the
// property server will not close the socket until *AFTER*
// the property is written to memory.
close(s);
}
break;
default:
close(s);
break;
}
}
這裡就是通過socket來得到對應msg進行對應的處理。完成property_set的真正操作。然後通過close來通知client那邊這裡ok了。
5、真正property_set的實現
其實上面我們也是通過代碼猜測一下收到的msg處理狀況,並沒有去看我們調用property_set的流程,這裡我們簡單看一下,他位於/bionic/libc/bionic/system_properties.c文件中:
我們調用property_set最終會調用到這個函數:
[cpp]
int __system_property_set(const char *key, const char *value)
{
int err;
int tries = 0;
int update_seen = 0;
prop_msg msg;
if(key == 0) return -1;
if(value == 0) value = "";
if(strlen(key) >= PROP_NAME_MAX) return -1;
if(strlen(value) >= PROP_VALUE_MAX) return -1;
memset(&msg, 0, sizeof msg);
//這裡就是我們收到的msg吧
msg.cmd = PROP_MSG_SETPROP;
strlcpy(msg.name, key, sizeof msg.name);
strlcpy(msg.value, value, sizeof msg.value);
//發送這個msg
err = send_prop_msg(&msg);
if(err < 0) {
return err;
}
return 0;
}
static int send_prop_msg(prop_msg *msg)
{
struct pollfd pollfds[1];
struct sockaddr_un addr;
socklen_t alen;
size_t namelen;
int s;
int r;
int result = -1;
//新建socket,有戲啊
s = socket(AF_LOCAL, SOCK_STREAM, 0);
if(s < 0) {
return result;
}
memset(&addr, 0, sizeof(addr));
namelen = strlen(property_service_socket);
strlcpy(addr.sun_path, property_service_socket, sizeof addr.sun_path);
addr.sun_family = AF_LOCAL;
alen = namelen + offsetof(struct sockaddr_un, sun_path) + 1;
//connect
if(TEMP_FAILURE_RETRY(connect(s, (struct sockaddr *) &addr, alen) < 0)) {
close(s);
return result;
}
//Send,哈哈
r = TEMP_FAILURE_RETRY(send(s, msg, sizeof(prop_msg), 0));
if(r == sizeof(prop_msg)) {
// We successfully wrote to the property server but now we
// wait for the property server to finish its work. It
// acknowledges its completion by closing the socket so we
// poll here (on nothing), waiting for the socket to close.
// If you 'adb shell setprop foo bar' you'll see the POLLHUP
// once the socket closes. Out of paranoia we cap our poll
// at 250 ms.
pollfds[0].fd = s;
pollfds[0].events = 0;
r = TEMP_FAILURE_RETRY(poll(pollfds, 1, 250 /* ms */));
if (r == 1 && (pollfds[0].revents & POLLHUP) != 0) {
result = 0;
} else {
<span style="color:#000000;">//就是這個地方太壞了,超時了,他也說是ok的。所以,哎~~~大家使用的時候自求多福吧,這段代碼太。。。。
</span> // Ignore the timeout and treat it like a success anyway.
// The init process is single-threaded and its property
// service is sometimes slow to respond (perhaps it's off
// starting a child process or something) and thus this
// times out and the caller thinks it failed, even though
// it's still getting around to it. So we fake it here,
// mostly for ctl.* properties, but we do try and wait 250
// ms so callers who do read-after-write can reliably see
// what they've written. Most of the time.
// TODO: fix the system properties design.
result = 0;
}
}
close(s);
return result;
}
 Android安全專項測試之反編譯
Android安全專項測試之反編譯
 Android RatingBar結合屬性動畫,快速實現 QQ群男女比例分布圖效果
Android RatingBar結合屬性動畫,快速實現 QQ群男女比例分布圖效果
 Android快樂貪吃蛇游戲實戰項目開發教程-04虛擬方向鍵(三)三角形按鈕效果
Android快樂貪吃蛇游戲實戰項目開發教程-04虛擬方向鍵(三)三角形按鈕效果
 教你關閉Android系統的位置跟蹤功能
教你關閉Android系統的位置跟蹤功能
 Android Application Thread CPU GC Operatiing and OOM Question 0603-隨手筆記
Android Application Thread CPU GC Operatiing and OOM Question 0603-隨手筆記