編輯:關於Android編程
Android版本:2.3.7_r1
Linux內核版本:android-goldfish-2.6.29
一、硬件抽象層核心數據結構
Android硬件抽象層有三個核心數據結構,分別是hw_module_t , hw_module_methods_t, hw_device_t。定義在hardware/libhardware/include/hardware/hardware.h文件中:
[cpp]
40/**
41 * Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
42 * and the fields of this data structure must begin with hw_module_t
43 * followed by module specific information.
44 */
45typedef struct hw_module_t {
46 /** tag must be initialized to HARDWARE_MODULE_TAG */
47 uint32_t tag;
48
49 /** major version number for the module */
50 uint16_t version_major;
51
52 /** minor version number of the module */
53 uint16_t version_minor;
54
55 /** Identifier of module */
56 const char *id;
57
58 /** Name of this module */
59 const char *name;
60
61 /** Author/owner/implementor of the module */
62 const char *author;
63
64 /** Modules methods */
65 struct hw_module_methods_t* methods;
66
67 /** module's dso */
68 void* dso;
69
70 /** padding to 128 bytes, reserved for future use */
71 uint32_t reserved[32-7];
72
73} hw_module_t;
74
75typedef struct hw_module_methods_t {
76 /** Open a specific device */
77 int (*open)(const struct hw_module_t* module, const char* id,
78 struct hw_device_t** device);
79
80} hw_module_methods_t;
81
82/**
83 * Every device data structure must begin with hw_device_t
84 * followed by module specific public methods and attributes.
85 */
86typedef struct hw_device_t {
87 /** tag must be initialized to HARDWARE_DEVICE_TAG */
88 uint32_t tag;
89
90 /** version number for hw_device_t */
91 uint32_t version;
92
93 /** reference to the module this device belongs to */
94 struct hw_module_t* module;
95
96 /** padding reserved for future use */
97 uint32_t reserved[12];
98
99 /** Close this device */
100 int (*close)(struct hw_device_t* device);
101
102} hw_device_t;
40/**
41 * Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
42 * and the fields of this data structure must begin with hw_module_t
43 * followed by module specific information.
44 */
45typedef struct hw_module_t {
46 /** tag must be initialized to HARDWARE_MODULE_TAG */
47 uint32_t tag;
48
49 /** major version number for the module */
50 uint16_t version_major;
51
52 /** minor version number of the module */
53 uint16_t version_minor;
54
55 /** Identifier of module */
56 const char *id;
57
58 /** Name of this module */
59 const char *name;
60
61 /** Author/owner/implementor of the module */
62 const char *author;
63
64 /** Modules methods */
65 struct hw_module_methods_t* methods;
66
67 /** module's dso */
68 void* dso;
69
70 /** padding to 128 bytes, reserved for future use */
71 uint32_t reserved[32-7];
72
73} hw_module_t;
74
75typedef struct hw_module_methods_t {
76 /** Open a specific device */
77 int (*open)(const struct hw_module_t* module, const char* id,
78 struct hw_device_t** device);
79
80} hw_module_methods_t;
81
82/**
83 * Every device data structure must begin with hw_device_t
84 * followed by module specific public methods and attributes.
85 */
86typedef struct hw_device_t {
87 /** tag must be initialized to HARDWARE_DEVICE_TAG */
88 uint32_t tag;
89
90 /** version number for hw_device_t */
91 uint32_t version;
92
93 /** reference to the module this device belongs to */
94 struct hw_module_t* module;
95
96 /** padding reserved for future use */
97 uint32_t reserved[12];
98
99 /** Close this device */
100 int (*close)(struct hw_device_t* device);
101
102} hw_device_t;
40-44行,注意這段說明文字,硬件抽象層HAL由一個一個的模塊組成,Android規定,每一個模塊都是一個命名為HAL_MODULE_INFO_SYM的自定義結構體,並且該結構體的第一個成員必須為hw_module_t類型的變量,其它成員變量根據需要由開發者設置。
82-85行,注意這段說明文字,每個設備對應一個自定義結構體,該結構體的第一個成員必須為hw_device_t,其它成員根據需要由開發者設置。
例如,sensor模塊對應的結構體定義在hardware/libhardware/include/hardware/sensors.h文件中:
[cpp]
?344/**
345 * Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
346 * and the fields of this data structure must begin with hw_module_t
347 * followed by module specific information.
348 */
349struct sensors_module_t {
350 struct hw_module_t common;
351
352 /**
353 * Enumerate all available sensors. The list is returned in "list".
354 * @return number of sensors in the list
355 */
356 int (*get_sensors_list)(struct sensors_module_t* module,
357 struct sensor_t const** list);
358};
sensor設備對應的結構體如下:
392/**
393 * Every device data structure must begin with hw_device_t
394 * followed by module specific public methods and attributes.
395 */
396struct sensors_poll_device_t {
397 struct hw_device_t common;
398
399 /** Activate/deactivate one sensor.
400 *
401 * @param handle is the handle of the sensor to change.
402 * @param enabled set to 1 to enable, or 0 to disable the sensor.
403 *
404 * @return 0 on success, negative errno code otherwise
405 */
406 int (*activate)(struct sensors_poll_device_t *dev,
407 int handle, int enabled);
408
409 /**
410 * Set the delay between sensor events in nanoseconds for a given sensor.
411 * It is an error to set a delay inferior to the value defined by
412 * sensor_t::minDelay. If sensor_t::minDelay is zero, setDelay() is
413 * ignored and returns 0.
414 *
415 * @return 0 if successful, < 0 on error
416 */
417 int (*setDelay)(struct sensors_poll_device_t *dev,
418 int handle, int64_t ns);
419
420 /**
421 * Returns an array of sensor data.
422 * This function must block until events are available.
423 *
424 * @return the number of events read on success, or -errno in case of an error.
425 * This function should never return 0 (no event).
426 *
427 */
428 int (*poll)(struct sensors_poll_device_t *dev,
429 sensors_event_t* data, int count);
430};
344/**
345 * Every hardware module must have a data structure named HAL_MODULE_INFO_SYM
346 * and the fields of this data structure must begin with hw_module_t
347 * followed by module specific information.
348 */
349struct sensors_module_t {
350 struct hw_module_t common;
351
352 /**
353 * Enumerate all available sensors. The list is returned in "list".
354 * @return number of sensors in the list
355 */
356 int (*get_sensors_list)(struct sensors_module_t* module,
357 struct sensor_t const** list);
358};
sensor設備對應的結構體如下:
392/**
393 * Every device data structure must begin with hw_device_t
394 * followed by module specific public methods and attributes.
395 */
396struct sensors_poll_device_t {
397 struct hw_device_t common;
398
399 /** Activate/deactivate one sensor.
400 *
401 * @param handle is the handle of the sensor to change.
402 * @param enabled set to 1 to enable, or 0 to disable the sensor.
403 *
404 * @return 0 on success, negative errno code otherwise
405 */
406 int (*activate)(struct sensors_poll_device_t *dev,
407 int handle, int enabled);
408
409 /**
410 * Set the delay between sensor events in nanoseconds for a given sensor.
411 * It is an error to set a delay inferior to the value defined by
412 * sensor_t::minDelay. If sensor_t::minDelay is zero, setDelay() is
413 * ignored and returns 0.
414 *
415 * @return 0 if successful, < 0 on error
416 */
417 int (*setDelay)(struct sensors_poll_device_t *dev,
418 int handle, int64_t ns);
419
420 /**
421 * Returns an array of sensor data.
422 * This function must block until events are available.
423 *
424 * @return the number of events read on success, or -errno in case of an error.
425 * This function should never return 0 (no event).
426 *
427 */
428 int (*poll)(struct sensors_poll_device_t *dev,
429 sensors_event_t* data, int count);
430};
對於三星公司的crespo(Nexus S的開發代號),其sensor模塊的真正實現代碼定義在device/samsung/crespo/libsensors/sensors.cpp文件中:
[cpp]
108static struct hw_module_methods_t sensors_module_methods = {
109 open: open_sensors
110};
111
112struct sensors_module_t HAL_MODULE_INFO_SYM = {
113 common: {
114 tag: HARDWARE_MODULE_TAG,
115 version_major: 1,
116 version_minor: 0,
117 id: SENSORS_HARDWARE_MODULE_ID,
118 name: "Samsung Sensor module",
119 author: "Samsung Electronic Company",
120 methods: &sensors_module_methods,
121 },
122 get_sensors_list: sensors__get_sensors_list,
123};
108static struct hw_module_methods_t sensors_module_methods = {
109 open: open_sensors
110};
111
112struct sensors_module_t HAL_MODULE_INFO_SYM = {
113 common: {
114 tag: HARDWARE_MODULE_TAG,
115 version_major: 1,
116 version_minor: 0,
117 id: SENSORS_HARDWARE_MODULE_ID,
118 name: "Samsung Sensor module",
119 author: "Samsung Electronic Company",
120 methods: &sensors_module_methods,
121 },
122 get_sensors_list: sensors__get_sensors_list,
123};而在open_sensors函數中,對相應設備對應的sensors_poll_device_t結構進行了賦值:
[cpp]
305/** Open a new instance of a sensor device using name */
306static int open_sensors(const struct hw_module_t* module, const char* id,
307 struct hw_device_t** device)
308{
309 int status = -EINVAL;
310 sensors_poll_context_t *dev = new sensors_poll_context_t();
311
312 memset(&dev->device, 0, sizeof(sensors_poll_device_t));
313
314 dev->device.common.tag = HARDWARE_DEVICE_TAG;
315 dev->device.common.version = 0;
316 dev->device.common.module = const_cast<hw_module_t*>(module);
317 dev->device.common.close = poll__close;
318 dev->device.activate = poll__activate;
319 dev->device.setDelay = poll__setDelay;
320 dev->device.poll = poll__poll;
321
322 *device = &dev->device.common;
323 status = 0;
324
325 return status;
326}
305/** Open a new instance of a sensor device using name */
306static int open_sensors(const struct hw_module_t* module, const char* id,
307 struct hw_device_t** device)
308{
309 int status = -EINVAL;
310 sensors_poll_context_t *dev = new sensors_poll_context_t();
311
312 memset(&dev->device, 0, sizeof(sensors_poll_device_t));
313
314 dev->device.common.tag = HARDWARE_DEVICE_TAG;
315 dev->device.common.version = 0;
316 dev->device.common.module = const_cast<hw_module_t*>(module);
317 dev->device.common.close = poll__close;
318 dev->device.activate = poll__activate;
319 dev->device.setDelay = poll__setDelay;
320 dev->device.poll = poll__poll;
321
322 *device = &dev->device.common;
323 status = 0;
324
325 return status;
326}
poll__close、poll__activate、poll__setDelay、poll__poll等函數也是在該文件中實現。
二、Android如何使用硬件抽象層
硬件抽象層的作用是對上層Application Framework屏蔽Linux底層驅動程序,那麼Application Framework與硬件抽象層通信的接口是誰呢?答案是hw_get_module函數,該函數定義在hardware/libhardware/hardware.c文件中:
[cpp]
120int hw_get_module(const char *id, const struct hw_module_t **module)
121{
122 int status;
123 int i;
124 const struct hw_module_t *hmi = NULL;
125 char prop[PATH_MAX];
126 char path[PATH_MAX];
127
128 /*
129 * Here we rely on the fact that calling dlopen multiple times on
130 * the same .so will simply increment a refcount (and not load
131 * a new copy of the library).
132 * We also assume that dlopen() is thread-safe.
133 */
134
135 /* Loop through the configuration variants looking for a module */
136 for (i=0 ; i<HAL_VARIANT_KEYS_COUNT+1 ; i++) {
137 if (i < HAL_VARIANT_KEYS_COUNT) {
138 if (property_get(variant_keys[i], prop, NULL) == 0) {
139 continue;
140 }
141 snprintf(path, sizeof(path), "%s/%s.%s.so",
142 HAL_LIBRARY_PATH1, id, prop);
143 if (access(path, R_OK) == 0) break;
144
145 snprintf(path, sizeof(path), "%s/%s.%s.so",
146 HAL_LIBRARY_PATH2, id, prop);
147 if (access(path, R_OK) == 0) break;
148 } else {
149 snprintf(path, sizeof(path), "%s/%s.default.so",
150 HAL_LIBRARY_PATH1, id);
151 if (access(path, R_OK) == 0) break;
152 }
153 }
154
155 status = -ENOENT;
156 if (i < HAL_VARIANT_KEYS_COUNT+1) {
157 /* load the module, if this fails, we're doomed, and we should not try
158 * to load a different variant. */
159 status = load(id, path, module);
160 }
161
162 return status;
163}
120int hw_get_module(const char *id, const struct hw_module_t **module)
121{
122 int status;
123 int i;
124 const struct hw_module_t *hmi = NULL;
125 char prop[PATH_MAX];
126 char path[PATH_MAX];
127
128 /*
129 * Here we rely on the fact that calling dlopen multiple times on
130 * the same .so will simply increment a refcount (and not load
131 * a new copy of the library).
132 * We also assume that dlopen() is thread-safe.
133 */
134
135 /* Loop through the configuration variants looking for a module */
136 for (i=0 ; i<HAL_VARIANT_KEYS_COUNT+1 ; i++) {
137 if (i < HAL_VARIANT_KEYS_COUNT) {
138 if (property_get(variant_keys[i], prop, NULL) == 0) {
139 continue;
140 }
141 snprintf(path, sizeof(path), "%s/%s.%s.so",
142 HAL_LIBRARY_PATH1, id, prop);
143 if (access(path, R_OK) == 0) break;
144
145 snprintf(path, sizeof(path), "%s/%s.%s.so",
146 HAL_LIBRARY_PATH2, id, prop);
147 if (access(path, R_OK) == 0) break;
148 } else {
149 snprintf(path, sizeof(path), "%s/%s.default.so",
150 HAL_LIBRARY_PATH1, id);
151 if (access(path, R_OK) == 0) break;
152 }
153 }
154
155 status = -ENOENT;
156 if (i < HAL_VARIANT_KEYS_COUNT+1) {
157 /* load the module, if this fails, we're doomed, and we should not try
158 * to load a different variant. */
159 status = load(id, path, module);
160 }
161
162 return status;
163}
hw_get_module函數的作用是由第一個參數id指定的模塊ID,找到模塊對應的hw_module_t結構體,保存在第二個參數module中。
136-153行,這個for循環是為了獲取模塊名及路徑,保存在path中。循環次數為HAL_VARIANT_KEYS_COUNT次,HAL_VARIANT_KEYS_COUNT是下面要用到的variant_keys數組的數組元素個數。
為了說明這個for循環是如何獲得模塊名及其路徑,我們要先來看一下variant_keys數組的定義,這個數組也是定義在hardware/libhardware/hardware.c文件中:
[cpp]
**
35 * There are a set of variant filename for modules. The form of the filename
36 * is "<MODULE_ID>.variant.so" so for the led module the Dream variants
37 * of base "ro.product.board", "ro.board.platform" and "ro.arch" would be:
38 *
39 * led.trout.so
40 * led.msm7k.so
41 * led.ARMV6.so
42 * led.default.so
43 */
44
45static const char *variant_keys[] = {
46 "ro.hardware", /* This goes first so that it can pick up a different
47 file on the emulator. */
48 "ro.product.board",
49 "ro.board.platform",
50 "ro.arch"
51};
52
53static const int HAL_VARIANT_KEYS_COUNT =
54 (sizeof(variant_keys)/sizeof(variant_keys[0]));
34/**
35 * There are a set of variant filename for modules. The form of the filename
36 * is "<MODULE_ID>.variant.so" so for the led module the Dream variants
37 * of base "ro.product.board", "ro.board.platform" and "ro.arch" would be:
38 *
39 * led.trout.so
40 * led.msm7k.so
41 * led.ARMV6.so
42 * led.default.so
43 */
44
45static const char *variant_keys[] = {
46 "ro.hardware", /* This goes first so that it can pick up a different
47 file on the emulator. */
48 "ro.product.board",
49 "ro.board.platform",
50 "ro.arch"
51};
52
53static const int HAL_VARIANT_KEYS_COUNT =
54 (sizeof(variant_keys)/sizeof(variant_keys[0]));
34-43行,這段注釋說明了模塊對應的動態庫的命名規范。模塊對應的動態庫文件名格式為<MODULE_ID>.variant.so,MODULE_ID是模塊對應的ID,不同模塊對應一個唯一固定的ID,那麼variant是什麼呢?又怎麼獲得variant呢?這就跟下面的variant_keys數組有關了。
45-51行,定義了variant_keys數組,這個數組有4個成員,即指向“ro.hardware”、“ ro.product.board”、“ ro.board.platform”、“ ro.arch”四個字符串的指針。我們可以將“ro.hardware”、“ ro.product.board”、“ ro.board.platform”、“ ro.arch”理解為屬性,系統會通過適當的方法,根據平台、架構等給這些屬性賦值。
例如,“ro.hardware”屬性的屬性值是在系統啟動時由init進程負責設置的。它首先會讀取/proc/cmdline文件,檢查裡面有沒有一個名為androidboot.hardware的屬性,如果有,就把它的值賦值給“ro.hardware”,否則,就將/proc/cpuinfo文件的內容讀取出來,並解析出Haredware字段的內容賦值給“ro.hardware”。例如在Android模擬器中,從/proc/cpuinfo文件中讀取出來的Hardware字段內容為goldfish,於是,init進程就會將 “ro.hardware” 屬性設置為goldfish。
“ ro.product.board”、“ ro.board.platform”、“ ro.arch”屬性是從/system/build.prop文件讀取出來的。/system/build.prop文件是由編譯系統中的編譯腳本build/core/Makefile和shell腳本build/tools/buildinfo.sh生成的,這裡不再詳細分析。
53-54行,定義了HAL_VARIANT_KEYS_COUNT變量,它是variant_keys數組的大小。
從上面我們已經知道了variant_keys數組的內容,也知道了模塊對應的動態庫的命名規范。現在我們的問題是模塊動態庫命名規范格式<MODULE_ID>.variant.so中的variant是怎樣獲得的?又跟variant_keys數組有什麼關系?為了回答這個問題,我們再回到hw_get_module函數的定義。
hw_get_module函數第138行,調用property_get(variant_keys[i], prop, NULL)函數,其作用是取得variant_keys[i]對應的屬性值,保存在prop中。也就是說,在第1次循環時,是取得variant_keys[0]即“ro.hardware”對應的屬性值,保存在prop中,如果沒有取得到,property_get函數會返回0,則進入下一次循環,依次嘗試取得“ ro.product.board”、“ ro.board.platform”、“ ro.arch”對應的屬性值,保存在prop中。如果取得了某個variant_keys[i]對應的屬性值,則在hw_get_module函數第141-142行,按<MODULE_ID>.variant.so規范,得到模塊動態庫的名字及路徑,其中variant就是我們前面得到的prop的值。
hw_get_module函數第148-153行,如果沒有找到variant_keys[i]對應的屬性,則使用<MODULE_ID>.default.so。
hw_get_module函數第156-160行,調用load(id, path, module)導入模塊動態庫,將模塊對應的hw_module_t結構體,保存在module變量中。load函數也定義在hardware/libhardware/hardware.c文件中:
[cpp]
56/**
57 * Load the file defined by the variant and if successful
58 * return the dlopen handle and the hmi.
59 * @return 0 = success, !0 = failure.
60 */
61static int load(const char *id,
62 const char *path,
63 const struct hw_module_t **pHmi)
64{
65 int status;
66 void *handle;
67 struct hw_module_t *hmi;
68
69 /*
70 * load the symbols resolving undefined symbols before
71 * dlopen returns. Since RTLD_GLOBAL is not or'd in with
72 * RTLD_NOW the external symbols will not be global
73 */
74 handle = dlopen(path, RTLD_NOW);
75 if (handle == NULL) {
76 char const *err_str = dlerror();
77 LOGE("load: module=%s\n%s", path, err_str?err_str:"unknown");
78 status = -EINVAL;
79 goto done;
80 }
81
82 /* Get the address of the struct hal_module_info. */
83 const char *sym = HAL_MODULE_INFO_SYM_AS_STR;
84 hmi = (struct hw_module_t *)dlsym(handle, sym);
85 if (hmi == NULL) {
86 LOGE("load: couldn't find symbol %s", sym);
87 status = -EINVAL;
88 goto done;
89 }
90
91 /* Check that the id matches */
92 if (strcmp(id, hmi->id) != 0) {
93 LOGE("load: id=%s != hmi->id=%s", id, hmi->id);
94 status = -EINVAL;
95 goto done;
96 }
97
98 hmi->dso = handle;
99
100 /* success */
101 status = 0;
102
103 done:
104 if (status != 0) {
105 hmi = NULL;
106 if (handle != NULL) {
107 dlclose(handle);
108 handle = NULL;
109 }
110 } else {
111 LOGV("loaded HAL id=%s path=%s hmi=%p handle=%p",
112 id, path, *pHmi, handle);
113 }
114
115 *pHmi = hmi;
116
117 return status;
118}
56/**
57 * Load the file defined by the variant and if successful
58 * return the dlopen handle and the hmi.
59 * @return 0 = success, !0 = failure.
60 */
61static int load(const char *id,
62 const char *path,
63 const struct hw_module_t **pHmi)
64{
65 int status;
66 void *handle;
67 struct hw_module_t *hmi;
68
69 /*
70 * load the symbols resolving undefined symbols before
71 * dlopen returns. Since RTLD_GLOBAL is not or'd in with
72 * RTLD_NOW the external symbols will not be global
73 */
74 handle = dlopen(path, RTLD_NOW);
75 if (handle == NULL) {
76 char const *err_str = dlerror();
77 LOGE("load: module=%s\n%s", path, err_str?err_str:"unknown");
78 status = -EINVAL;
79 goto done;
80 }
81
82 /* Get the address of the struct hal_module_info. */
83 const char *sym = HAL_MODULE_INFO_SYM_AS_STR;
84 hmi = (struct hw_module_t *)dlsym(handle, sym);
85 if (hmi == NULL) {
86 LOGE("load: couldn't find symbol %s", sym);
87 status = -EINVAL;
88 goto done;
89 }
90
91 /* Check that the id matches */
92 if (strcmp(id, hmi->id) != 0) {
93 LOGE("load: id=%s != hmi->id=%s", id, hmi->id);
94 status = -EINVAL;
95 goto done;
96 }
97
98 hmi->dso = handle;
99
100 /* success */
101 status = 0;
102
103 done:
104 if (status != 0) {
105 hmi = NULL;
106 if (handle != NULL) {
107 dlclose(handle);
108 handle = NULL;
109 }
110 } else {
111 LOGV("loaded HAL id=%s path=%s hmi=%p handle=%p",
112 id, path, *pHmi, handle);
113 }
114
115 *pHmi = hmi;
116
117 return status;
118}
第74行,調用dlopen(path, RTLD_NOW)導入path指定的模塊動態庫。
第83-84行,通過dlsym函數取得HAL_MODULE_INFO_SYM_AS_STR指定的變量的地址,這個地址就是模塊對應的自定義結構體地址。
第115行,將hw_module_t結構賦值給傳遞進來的參數pHmi,即返回給上層調用函數。
分析到這裡,我們可以看出,通過hw_get_module函數,Application Framework代碼可以通過指定的模塊ID找到模塊hw_module_t結構體。有了hw_module_t結構體,就可以調用hw_module_t-> methods->open函數,在open函數中,完成對設備對應的hw_device_t結構體的初始化,並指定設備相關的自定義函數。
 Android Fragment的生命周期詳解
Android Fragment的生命周期詳解
Fragments的生命周期 每一個fragments 都有自己的一套生命周期回調方法和處理自己
 android開發之橫向滾動/豎向滾動的ListView(固定列頭)
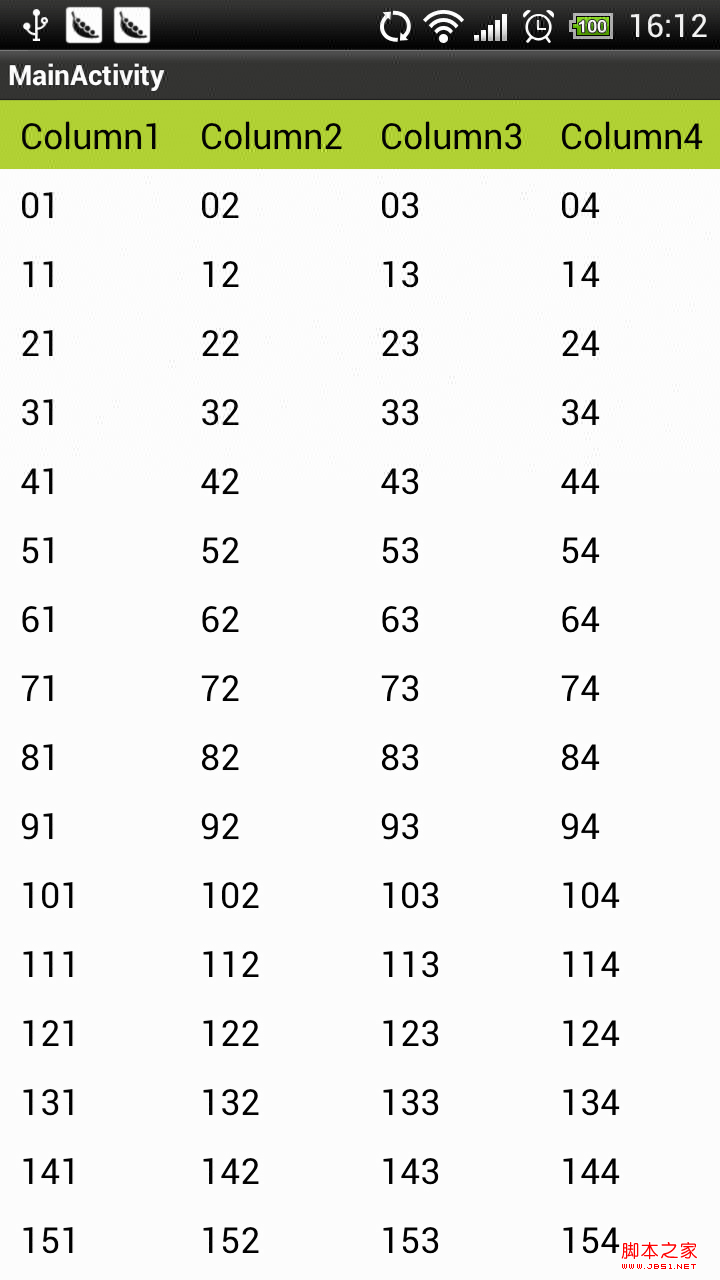
android開發之橫向滾動/豎向滾動的ListView(固定列頭)
由於項目需要,我們需要一個可以橫向滾動的,又可以豎向滾動的 表格。而且又要考慮大數據量(行)的展示視圖。經過幾天的研究終於搞定,做了一個演示。貼圖如下: &nb
 Android 4.4 KitKat NotificationManagerService使用詳解與原理分析(一)__使用詳解
Android 4.4 KitKat NotificationManagerService使用詳解與原理分析(一)__使用詳解
概況 Android在4.3的版本中(即API 18)加入了NotificationListenerService,根據SDK的描述(AndroidDev
 Android編程開發中ListView的常見用法分析
Android編程開發中ListView的常見用法分析
本文實例講述了Android編程開發中ListView的常見用法。分享給大家供大家參考,具體如下:一、ListView的使用步驟ListView的使用通常有以下三個要素: