編輯:關於Android編程
Android Camera數據流完整分析
之前已經有很多文章一直在講述Android Camera,這裡也算是進行以下總結
我們依舊從camera 的打開開始,逐步看看camera的數據流向,內存分配,首先打開camera的第一步,實例化camera類,onCreate被調用,在這個方法中到底做了些什麼事情,也在這裡做一下總結:
1.實例化FocusManager
2.開啟一個CameraOpenThread用於打開camera的全部過程,mCameraOpenThread.start();
3.實例化PreferenceInflater,初始化一些參數
4.實例化TouchManager
5.實例化RotateDialogController等等等
重點是下面幾行代碼,之前已經不止一次提到,不在多說了
[html]
// don't set mSurfaceHolder here. We have it set ONLY within
// surfaceChanged / surfaceDestroyed, other parts of the code
// assume that when it is set, the surface is also set.
SurfaceView preview = (SurfaceView) findViewById(R.id.camera_preview);
SurfaceHolder holder = preview.getHolder();
holder.addCallback(this);
// don't set mSurfaceHolder here. We have it set ONLY within
// surfaceChanged / surfaceDestroyed, other parts of the code
// assume that when it is set, the surface is also set.
SurfaceView preview = (SurfaceView) findViewById(R.id.camera_preview);
SurfaceHolder holder = preview.getHolder();
holder.addCallback(this);另外這個方法中,還開啟了一個startPreviewThread用於開始preview過程,初始化完成之後就開啟preview功能
[html]
Thread mCameraPreviewThread = new Thread(new Runnable() {
public void run() {
initializeCapabilities();
startPreview(true);
}
});
Thread mCameraPreviewThread = new Thread(new Runnable() {
public void run() {
initializeCapabilities();
startPreview(true);
}
});這個線程進行初始化之後就調用了app層的startPreview方法,這裡開始了萬裡長征的第一步
這裡還是花一點時間說說camera的打開過程,從app調用到的open方法過程這之前的文章中已經講過,在底層的open方法中完成以下工作
1.為上層調用注冊調用接口
2.實例化hal層,並初始化,這個hal層初始化的過程同樣之前的文章中已經詳細講過,這個初始化過程非常重要,直接影響著之後的操作
回到我們的startPreview,一步一步看看他的走向
app層---------------------------做一些基本初始化,最重要的就是setPreviewwindow這個方法了,之前也已經詳細分析過了,然後調用frameworks層的方法
frameworks層 ---------------這裡只是定義了startPreview這個方式,通過JNI層調用
JNI層---------------------------這裡作為一個中間站,不做任何處理,轉去調用下一層實現
camera client層-------------同樣可以理解為一個中轉站,通過binder機制接著往下走
camera server層------------初始化顯示窗口屬性,調用下一層
hardware interface層------轉調camerahal_module中的方法
camera hal層----------------這個hal層的startPreview實現是整個preview過程中最為重要的部分,下面再說明
下面就是通過hal層分發命令通過V4LCameraAdapter或者OMXCameraAdapter與kernel driver進行交互
我們看一下server層的調用,相對較重要
[html]
status_t CameraService::Client::startPreview() {
LOG1("startPreview (pid %d)", getCallingPid());
return startCameraMode(<SPAN style="BACKGROUND-COLOR: rgb(51,255,51)">CAMERA_PREVIEW_MODE</SPAN>);
}
status_t CameraService::Client::startPreview() {
LOG1("startPreview (pid %d)", getCallingPid());
return startCameraMode(CAMERA_PREVIEW_MODE);
}[html] view plaincopyprint?// start preview or recording
status_t CameraService::Client::startCameraMode(camera_mode mode) {
LOG1("startCameraMode(%d)", mode);
Mutex::Autolock lock(mLock);
status_t result = checkPidAndHardware();
if (result != NO_ERROR) return result;
switch(mode) {
case CAMERA_PREVIEW_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
LOG1("mSurface is not set yet.");
// still able to start preview in this case.
}
<SPAN style="BACKGROUND-COLOR: rgb(51,255,51)">return startPreviewMode();</SPAN>
case CAMERA_RECORDING_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
LOGE("mSurface or mPreviewWindow must be set before startRecordingMode.");
return INVALID_OPERATION;
}
return startRecordingMode();
default:
return UNKNOWN_ERROR;
}
}
// start preview or recording
status_t CameraService::Client::startCameraMode(camera_mode mode) {
LOG1("startCameraMode(%d)", mode);
Mutex::Autolock lock(mLock);
status_t result = checkPidAndHardware();
if (result != NO_ERROR) return result;
switch(mode) {
case CAMERA_PREVIEW_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
LOG1("mSurface is not set yet.");
// still able to start preview in this case.
}
return startPreviewMode();
case CAMERA_RECORDING_MODE:
if (mSurface == 0 && mPreviewWindow == 0) {
LOGE("mSurface or mPreviewWindow must be set before startRecordingMode.");
return INVALID_OPERATION;
}
return startRecordingMode();
default:
return UNKNOWN_ERROR;
}
}[html] view plaincopyprint?status_t CameraService::Client::startPreviewMode() {
LOG1("startPreviewMode");
status_t result = NO_ERROR;
// if preview has been enabled, nothing needs to be done
if (mHardware->previewEnabled()) {
return NO_ERROR;
}
if (mPreviewWindow != 0) {
native_window_set_scaling_mode(mPreviewWindow.get(),
NATIVE_WINDOW_SCALING_MODE_SCALE_TO_WINDOW);
native_window_set_buffers_transform(mPreviewWindow.get(),
mOrientation);
}
#ifdef OMAP_ENHANCEMENT
disableMsgType(CAMERA_MSG_COMPRESSED_BURST_IMAGE);
#endif
mHardware->setPreviewWindow(mPreviewWindow);
result = mHardware->startPreview();
return result;
}
status_t CameraService::Client::startPreviewMode() {
LOG1("startPreviewMode");
status_t result = NO_ERROR;
// if preview has been enabled, nothing needs to be done
if (mHardware->previewEnabled()) {
return NO_ERROR;
}
if (mPreviewWindow != 0) {
native_window_set_scaling_mode(mPreviewWindow.get(),
NATIVE_WINDOW_SCALING_MODE_SCALE_TO_WINDOW);
native_window_set_buffers_transform(mPreviewWindow.get(),
mOrientation);
}
#ifdef OMAP_ENHANCEMENT
disableMsgType(CAMERA_MSG_COMPRESSED_BURST_IMAGE);
#endif
mHardware->setPreviewWindow(mPreviewWindow);
result = mHardware->startPreview();
return result;
}
在這個startPreviewMode方法中,同樣對previewWindow進行了著重的初始化,這個window一直都是非常重要的,這裡我一直沒有說到setPreviewwindow這個方法的調用,只是因為這片文章的重點不在這裡,但是不代表你可以小視他
這裡我們把重點方法hal層中,在hal層的startPreview方法中,首先調用preview之前的initialize方法完成一些很重要的初始化過程,這裡其實我學習的不是很透徹,僅個人思路,主要以下兩個過程重點關注
1.申請preview buffers
2.hal向camera adapter發送CAMERA_USE_BUFFERS_PREVIEW命令
hal層的sendCommand方法最終會調用OMXCameraAdapter的UseBuffers方法,這個方法使OMXCameraAdapter的組件接口與傳入的camerabuffer綁定起來
[html]
status_t OMXCameraAdapter::UseBuffersPreview(CameraBuffer * bufArr, int num)
{
status_t ret = NO_ERROR;
OMX_ERRORTYPE eError = OMX_ErrorNone;
int tmpHeight, tmpWidth;
LOG_FUNCTION_NAME;
if(!bufArr)
{
CAMHAL_LOGEA("NULL pointer passed for buffArr");
LOG_FUNCTION_NAME_EXIT;
return BAD_VALUE;
}
OMXCameraPortParameters * mPreviewData = NULL;
OMXCameraPortParameters *measurementData = NULL;
mPreviewData = &mCameraAdapterParameters.mCameraPortParams[mCameraAdapterParameters.mPrevPortIndex];//<SPAN style="FONT-FAMILY: Arial, Helvetica, sans-serif">mPreviewData 指針指向preview port</SPAN>
measurementData = &mCameraAdapterParameters.mCameraPortParams[mCameraAdapterParameters.mMeasurementPortIndex];
mPreviewData->mNumBufs = num ;
if ( 0 != mUsePreviewSem.Count() )
{
CAMHAL_LOGEB("Error mUsePreviewSem semaphore count %d", mUsePreviewSem.Count());
LOG_FUNCTION_NAME_EXIT;
return NO_INIT;
}
if(mPreviewData->mNumBufs != num)
{
CAMHAL_LOGEA("Current number of buffers doesnt equal new num of buffers passed!");
LOG_FUNCTION_NAME_EXIT;
return BAD_VALUE;
}
mStateSwitchLock.lock();
if ( mComponentState == OMX_StateLoaded ) {
if (mPendingPreviewSettings & SetLDC) {
mPendingPreviewSettings &= ~SetLDC;
ret = setLDC(mIPP);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setLDC() failed %d", ret);
}
}
if (mPendingPreviewSettings & SetNSF) {
mPendingPreviewSettings &= ~SetNSF;
ret = setNSF(mIPP);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setNSF() failed %d", ret);
}
}
if (mPendingPreviewSettings & SetCapMode) {
mPendingPreviewSettings &= ~SetCapMode;
ret = setCaptureMode(mCapMode);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setCaptureMode() failed %d", ret);
}
}
if(mCapMode == OMXCameraAdapter::VIDEO_MODE) {
if (mPendingPreviewSettings & SetVNF) {
mPendingPreviewSettings &= ~SetVNF;
ret = enableVideoNoiseFilter(mVnfEnabled);
if ( NO_ERROR != ret){
CAMHAL_LOGEB("Error configuring VNF %x", ret);
}
}
if (mPendingPreviewSettings & SetVSTAB) {
mPendingPreviewSettings &= ~SetVSTAB;
ret = enableVideoStabilization(mVstabEnabled);
if ( NO_ERROR != ret) {
CAMHAL_LOGEB("Error configuring VSTAB %x", ret);
}
}
}
}
ret = setSensorOrientation(mSensorOrientation);
if ( NO_ERROR != ret )
{
CAMHAL_LOGEB("Error configuring Sensor Orientation %x", ret);
mSensorOrientation = 0;
}
if ( mComponentState == OMX_StateLoaded )
{
///Register for IDLE state switch event
ret = RegisterForEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandStateSet,
OMX_StateIdle,
mUsePreviewSem);
if(ret!=NO_ERROR)
{
CAMHAL_LOGEB("Error in registering for event %d", ret);
goto EXIT;
}
///Once we get the buffers, move component state to idle state and pass the buffers to OMX comp using UseBuffer
eError = OMX_SendCommand (mCameraAdapterParameters.mHandleComp ,
OMX_CommandStateSet,
OMX_StateIdle,
NULL);
CAMHAL_LOGDB("OMX_SendCommand(OMX_CommandStateSet) 0x%x", eError);
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
mComponentState = OMX_StateIdle;
}
else
{
///Register for Preview port ENABLE event
ret = RegisterForEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
mUsePreviewSem);
if ( NO_ERROR != ret )
{
CAMHAL_LOGEB("Error in registering for event %d", ret);
goto EXIT;
}
///Enable Preview Port
eError = OMX_SendCommand(mCameraAdapterParameters.mHandleComp,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
NULL);
}
///Configure DOMX to use either gralloc handles or vptrs
OMX_TI_PARAMUSENATIVEBUFFER domxUseGrallocHandles;
OMX_INIT_STRUCT_PTR (&domxUseGrallocHandles, OMX_TI_PARAMUSENATIVEBUFFER);
domxUseGrallocHandles.nPortIndex = mCameraAdapterParameters.mPrevPortIndex;
domxUseGrallocHandles.bEnable = OMX_TRUE;
eError = OMX_SetParameter(mCameraAdapterParameters.mHandleComp,
(OMX_INDEXTYPE)OMX_TI_IndexUseNativeBuffers, &domxUseGrallocHandles);
if(eError!=OMX_ErrorNone)
{
CAMHAL_LOGEB("OMX_SetParameter - %x", eError);
}
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
OMX_BUFFERHEADERTYPE *pBufferHdr;
for(int index=0;index<num;index++) {
OMX_U8 *ptr;
ptr = (OMX_U8 *)camera_buffer_get_omx_ptr (&bufArr[index]);
<SPAN style="BACKGROUND-COLOR: rgb(255,204,0)"> eError = OMX_UseBuffer( mCameraAdapterParameters.mHandleComp,
&pBufferHdr,
mCameraAdapterParameters.mPrevPortIndex,
0,
mPreviewData->mBufSize,
ptr);</SPAN>
if(eError!=OMX_ErrorNone)
{
CAMHAL_LOGEB("OMX_UseBuffer-0x%x", eError);
}
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
pBufferHdr->pAppPrivate = (OMX_PTR)&bufArr[index];
pBufferHdr->nSize = sizeof(OMX_BUFFERHEADERTYPE);
pBufferHdr->nVersion.s.nVersionMajor = 1 ;
pBufferHdr->nVersion.s.nVersionMinor = 1 ;
pBufferHdr->nVersion.s.nRevision = 0 ;
pBufferHdr->nVersion.s.nStep = 0;
<SPAN style="BACKGROUND-COLOR: rgb(51,255,51)">mPreviewData->mBufferHeader[index] = pBufferHdr;這裡組件的屬性結構指針通過bufferheader與申請的camerabuffer綁定到一起了</SPAN>
}
if ( mMeasurementEnabled )
{
for( int i = 0; i < num; i++ )
{
OMX_BUFFERHEADERTYPE *pBufHdr;
OMX_U8 *ptr;
ptr = (OMX_U8 *)camera_buffer_get_omx_ptr (&mPreviewDataBuffers[i]);
eError = OMX_UseBuffer( mCameraAdapterParameters.mHandleComp,
&pBufHdr,
mCameraAdapterParameters.mMeasurementPortIndex,
0,
measurementData->mBufSize,
ptr);
if ( eError == OMX_ErrorNone )
{
pBufHdr->pAppPrivate = (OMX_PTR *)&mPreviewDataBuffers[i];
pBufHdr->nSize = sizeof(OMX_BUFFERHEADERTYPE);
pBufHdr->nVersion.s.nVersionMajor = 1 ;
pBufHdr->nVersion.s.nVersionMinor = 1 ;
pBufHdr->nVersion.s.nRevision = 0 ;
pBufHdr->nVersion.s.nStep = 0;
measurementData->mBufferHeader[i] = pBufHdr;
}
else
{
CAMHAL_LOGEB("OMX_UseBuffer -0x%x", eError);
ret = BAD_VALUE;
break;
}
}
}
CAMHAL_LOGDA("Registering preview buffers");
ret = mUsePreviewSem.WaitTimeout(OMX_CMD_TIMEOUT);
//If somethiing bad happened while we wait
if (mComponentState == OMX_StateInvalid)
{
CAMHAL_LOGEA("Invalid State after Registering preview buffers Exitting!!!");
goto EXIT;
}
if ( NO_ERROR == ret )
{
CAMHAL_LOGDA("Preview buffer registration successfull");
}
else
{
if ( mComponentState == OMX_StateLoaded )
{
ret |= RemoveEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandStateSet,
OMX_StateIdle,
NULL);
}
else
{
ret |= SignalEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
NULL);
}
CAMHAL_LOGEA("Timeout expired on preview buffer registration");
goto EXIT;
}
LOG_FUNCTION_NAME_EXIT;
return (ret | ErrorUtils::omxToAndroidError(eError));
///If there is any failure, we reach here.
///Here, we do any resource freeing and convert from OMX error code to Camera Hal error code
EXIT:
mStateSwitchLock.unlock();
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, ret, eError);
performCleanupAfterError();
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, ret, eError);
LOG_FUNCTION_NAME_EXIT;
return (ret | ErrorUtils::omxToAndroidError(eError));
}
status_t OMXCameraAdapter::UseBuffersPreview(CameraBuffer * bufArr, int num)
{
status_t ret = NO_ERROR;
OMX_ERRORTYPE eError = OMX_ErrorNone;
int tmpHeight, tmpWidth;
LOG_FUNCTION_NAME;
if(!bufArr)
{
CAMHAL_LOGEA("NULL pointer passed for buffArr");
LOG_FUNCTION_NAME_EXIT;
return BAD_VALUE;
}
OMXCameraPortParameters * mPreviewData = NULL;
OMXCameraPortParameters *measurementData = NULL;
mPreviewData = &mCameraAdapterParameters.mCameraPortParams[mCameraAdapterParameters.mPrevPortIndex];//mPreviewData 指針指向preview port
measurementData = &mCameraAdapterParameters.mCameraPortParams[mCameraAdapterParameters.mMeasurementPortIndex];
mPreviewData->mNumBufs = num ;
if ( 0 != mUsePreviewSem.Count() )
{
CAMHAL_LOGEB("Error mUsePreviewSem semaphore count %d", mUsePreviewSem.Count());
LOG_FUNCTION_NAME_EXIT;
return NO_INIT;
}
if(mPreviewData->mNumBufs != num)
{
CAMHAL_LOGEA("Current number of buffers doesnt equal new num of buffers passed!");
LOG_FUNCTION_NAME_EXIT;
return BAD_VALUE;
}
mStateSwitchLock.lock();
if ( mComponentState == OMX_StateLoaded ) {
if (mPendingPreviewSettings & SetLDC) {
mPendingPreviewSettings &= ~SetLDC;
ret = setLDC(mIPP);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setLDC() failed %d", ret);
}
}
if (mPendingPreviewSettings & SetNSF) {
mPendingPreviewSettings &= ~SetNSF;
ret = setNSF(mIPP);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setNSF() failed %d", ret);
}
}
if (mPendingPreviewSettings & SetCapMode) {
mPendingPreviewSettings &= ~SetCapMode;
ret = setCaptureMode(mCapMode);
if ( NO_ERROR != ret ) {
CAMHAL_LOGEB("setCaptureMode() failed %d", ret);
}
}
if(mCapMode == OMXCameraAdapter::VIDEO_MODE) {
if (mPendingPreviewSettings & SetVNF) {
mPendingPreviewSettings &= ~SetVNF;
ret = enableVideoNoiseFilter(mVnfEnabled);
if ( NO_ERROR != ret){
CAMHAL_LOGEB("Error configuring VNF %x", ret);
}
}
if (mPendingPreviewSettings & SetVSTAB) {
mPendingPreviewSettings &= ~SetVSTAB;
ret = enableVideoStabilization(mVstabEnabled);
if ( NO_ERROR != ret) {
CAMHAL_LOGEB("Error configuring VSTAB %x", ret);
}
}
}
}
ret = setSensorOrientation(mSensorOrientation);
if ( NO_ERROR != ret )
{
CAMHAL_LOGEB("Error configuring Sensor Orientation %x", ret);
mSensorOrientation = 0;
}
if ( mComponentState == OMX_StateLoaded )
{
///Register for IDLE state switch event
ret = RegisterForEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandStateSet,
OMX_StateIdle,
mUsePreviewSem);
if(ret!=NO_ERROR)
{
CAMHAL_LOGEB("Error in registering for event %d", ret);
goto EXIT;
}
///Once we get the buffers, move component state to idle state and pass the buffers to OMX comp using UseBuffer
eError = OMX_SendCommand (mCameraAdapterParameters.mHandleComp ,
OMX_CommandStateSet,
OMX_StateIdle,
NULL);
CAMHAL_LOGDB("OMX_SendCommand(OMX_CommandStateSet) 0x%x", eError);
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
mComponentState = OMX_StateIdle;
}
else
{
///Register for Preview port ENABLE event
ret = RegisterForEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
mUsePreviewSem);
if ( NO_ERROR != ret )
{
CAMHAL_LOGEB("Error in registering for event %d", ret);
goto EXIT;
}
///Enable Preview Port
eError = OMX_SendCommand(mCameraAdapterParameters.mHandleComp,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
NULL);
}
///Configure DOMX to use either gralloc handles or vptrs
OMX_TI_PARAMUSENATIVEBUFFER domxUseGrallocHandles;
OMX_INIT_STRUCT_PTR (&domxUseGrallocHandles, OMX_TI_PARAMUSENATIVEBUFFER);
domxUseGrallocHandles.nPortIndex = mCameraAdapterParameters.mPrevPortIndex;
domxUseGrallocHandles.bEnable = OMX_TRUE;
eError = OMX_SetParameter(mCameraAdapterParameters.mHandleComp,
(OMX_INDEXTYPE)OMX_TI_IndexUseNativeBuffers, &domxUseGrallocHandles);
if(eError!=OMX_ErrorNone)
{
CAMHAL_LOGEB("OMX_SetParameter - %x", eError);
}
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
OMX_BUFFERHEADERTYPE *pBufferHdr;
for(int index=0;index<num;index++) {
OMX_U8 *ptr;
ptr = (OMX_U8 *)camera_buffer_get_omx_ptr (&bufArr[index]);
eError = OMX_UseBuffer( mCameraAdapterParameters.mHandleComp,
&pBufferHdr,
mCameraAdapterParameters.mPrevPortIndex,
0,
mPreviewData->mBufSize,
ptr);
if(eError!=OMX_ErrorNone)
{
CAMHAL_LOGEB("OMX_UseBuffer-0x%x", eError);
}
GOTO_EXIT_IF((eError!=OMX_ErrorNone), eError);
pBufferHdr->pAppPrivate = (OMX_PTR)&bufArr[index];
pBufferHdr->nSize = sizeof(OMX_BUFFERHEADERTYPE);
pBufferHdr->nVersion.s.nVersionMajor = 1 ;
pBufferHdr->nVersion.s.nVersionMinor = 1 ;
pBufferHdr->nVersion.s.nRevision = 0 ;
pBufferHdr->nVersion.s.nStep = 0;
mPreviewData->mBufferHeader[index] = pBufferHdr;這裡組件的屬性結構指針通過bufferheader與申請的camerabuffer綁定到一起了
}
if ( mMeasurementEnabled )
{
for( int i = 0; i < num; i++ )
{
OMX_BUFFERHEADERTYPE *pBufHdr;
OMX_U8 *ptr;
ptr = (OMX_U8 *)camera_buffer_get_omx_ptr (&mPreviewDataBuffers[i]);
eError = OMX_UseBuffer( mCameraAdapterParameters.mHandleComp,
&pBufHdr,
mCameraAdapterParameters.mMeasurementPortIndex,
0,
measurementData->mBufSize,
ptr);
if ( eError == OMX_ErrorNone )
{
pBufHdr->pAppPrivate = (OMX_PTR *)&mPreviewDataBuffers[i];
pBufHdr->nSize = sizeof(OMX_BUFFERHEADERTYPE);
pBufHdr->nVersion.s.nVersionMajor = 1 ;
pBufHdr->nVersion.s.nVersionMinor = 1 ;
pBufHdr->nVersion.s.nRevision = 0 ;
pBufHdr->nVersion.s.nStep = 0;
measurementData->mBufferHeader[i] = pBufHdr;
}
else
{
CAMHAL_LOGEB("OMX_UseBuffer -0x%x", eError);
ret = BAD_VALUE;
break;
}
}
}
CAMHAL_LOGDA("Registering preview buffers");
ret = mUsePreviewSem.WaitTimeout(OMX_CMD_TIMEOUT);
//If somethiing bad happened while we wait
if (mComponentState == OMX_StateInvalid)
{
CAMHAL_LOGEA("Invalid State after Registering preview buffers Exitting!!!");
goto EXIT;
}
if ( NO_ERROR == ret )
{
CAMHAL_LOGDA("Preview buffer registration successfull");
}
else
{
if ( mComponentState == OMX_StateLoaded )
{
ret |= RemoveEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandStateSet,
OMX_StateIdle,
NULL);
}
else
{
ret |= SignalEvent(mCameraAdapterParameters.mHandleComp,
OMX_EventCmdComplete,
OMX_CommandPortEnable,
mCameraAdapterParameters.mPrevPortIndex,
NULL);
}
CAMHAL_LOGEA("Timeout expired on preview buffer registration");
goto EXIT;
}
LOG_FUNCTION_NAME_EXIT;
return (ret | ErrorUtils::omxToAndroidError(eError));
///If there is any failure, we reach here.
///Here, we do any resource freeing and convert from OMX error code to Camera Hal error code
EXIT:
mStateSwitchLock.unlock();
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, ret, eError);
performCleanupAfterError();
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, ret, eError);
LOG_FUNCTION_NAME_EXIT;
return (ret | ErrorUtils::omxToAndroidError(eError));
}
上面所說的過程個人感覺比較抽象,越到底層越是不太好理解了
上面camerbuffer申請處理結束,setpreviewwindow初始化結束,下面就是開始真正的preview,在真正開始preview這個方法中,其實總結起來只有一點,就是通過fillbuffer方法將你申請好的buffer填充到組件port,等待port處理完視頻數據會放到你填充給他的buffer中,好像你讓別人幫你盛飯似的,你得把飯碗給別人,人家盛飯完了,再把飯碗給你,這時候飯碗裡已經有飯了,同樣的,我們的buffer中已經有數據了,那我們怎麼得到這個數據呢??我們給到port的buffer如果已經填滿了數據,當然我們開始給到port時這個buffer是空的,port填充滿這個buffer,會通知我們,同時攜帶著把這個buffer給到我們,這是通過fillbufferdone這個回調實現的
[html]
#endif
/*========================================================*/
/* @ fn SampleTest_FillBufferDone :: Application callback*/
/*========================================================*/
OMX_ERRORTYPE OMXCameraAdapter::OMXCameraAdapterFillBufferDone(OMX_IN OMX_HANDLETYPE hComponent,
OMX_IN OMX_BUFFERHEADERTYPE* pBuffHeader)
{
status_t stat = NO_ERROR;
status_t res1, res2;
OMXCameraPortParameters *pPortParam;
OMX_ERRORTYPE eError = OMX_ErrorNone;
CameraFrame::FrameType typeOfFrame = CameraFrame::ALL_FRAMES;
unsigned int refCount = 0;
BaseCameraAdapter::AdapterState state, nextState;
BaseCameraAdapter::getState(state);
BaseCameraAdapter::getNextState(nextState);
sp<CameraMetadataResult> metadataResult = NULL;
unsigned int mask = 0xFFFF;
CameraFrame cameraFrame;
OMX_OTHER_EXTRADATATYPE *extraData;
OMX_TI_ANCILLARYDATATYPE *ancillaryData = NULL;
bool snapshotFrame = false;
if ( NULL == pBuffHeader ) {
return OMX_ErrorBadParameter;
}
#ifdef CAMERAHAL_OMX_PROFILING
storeProfilingData(pBuffHeader);
#endif
res1 = res2 = NO_ERROR;
if ( !pBuffHeader || !pBuffHeader->pBuffer ) {
CAMHAL_LOGEA("NULL Buffer from OMX");
return OMX_ErrorNone;
}
pPortParam = &(mCameraAdapterParameters.mCameraPortParams[pBuffHeader->nOutputPortIndex]);
// Find buffer and mark it as filled
for (int i = 0; i < pPortParam->mNumBufs; i++) {
if (pPortParam->mBufferHeader[i] == pBuffHeader) {
pPortParam->mStatus[i] = OMXCameraPortParameters::DONE;
}
}
if (pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_PREVIEW)
{
if ( ( PREVIEW_ACTIVE & state ) != PREVIEW_ACTIVE )
{
return OMX_ErrorNone;
}
if ( mWaitingForSnapshot ) {
extraData = getExtradata(pBuffHeader->pPlatformPrivate,
(OMX_EXTRADATATYPE) OMX_AncillaryData);
if ( NULL != extraData ) {
ancillaryData = (OMX_TI_ANCILLARYDATATYPE*) extraData->data;
if ((OMX_2D_Snap == ancillaryData->eCameraView)
|| (OMX_3D_Left_Snap == ancillaryData->eCameraView)
|| (OMX_3D_Right_Snap == ancillaryData->eCameraView)) {
snapshotFrame = OMX_TRUE;
} else {
snapshotFrame = OMX_FALSE;
}
mPending3Asettings |= SetFocus;
}
}
///Prepare the frames to be sent - initialize CameraFrame object and reference count
// TODO(XXX): ancillary data for snapshot frame is not being sent for video snapshot
// if we are waiting for a snapshot and in video mode...go ahead and send
// this frame as a snapshot
if( mWaitingForSnapshot && (mCapturedFrames > 0) &&
(snapshotFrame || (mCapMode == VIDEO_MODE)))
{
typeOfFrame = CameraFrame::SNAPSHOT_FRAME;
mask = (unsigned int)CameraFrame::SNAPSHOT_FRAME;
// video snapshot gets ancillary data and wb info from last snapshot frame
mCaptureAncillaryData = ancillaryData;
mWhiteBalanceData = NULL;
extraData = getExtradata(pBuffHeader->pPlatformPrivate,
(OMX_EXTRADATATYPE) OMX_WhiteBalance);
if ( NULL != extraData )
{
mWhiteBalanceData = (OMX_TI_WHITEBALANCERESULTTYPE*) extraData->data;
}
}
else
{
typeOfFrame = CameraFrame::PREVIEW_FRAME_SYNC;
mask = (unsigned int)CameraFrame::PREVIEW_FRAME_SYNC;
}
if (mRecording)
{
mask |= (unsigned int)CameraFrame::VIDEO_FRAME_SYNC;
mFramesWithEncoder++;
}
//LOGV("FBD pBuffer = 0x%x", pBuffHeader->pBuffer);
if( mWaitingForSnapshot )
{
if (!mBracketingEnabled &&
((HIGH_SPEED == mCapMode) || (VIDEO_MODE == mCapMode)) )
{
notifyShutterSubscribers();
}
}
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
mFramesWithDisplay++;
mFramesWithDucati--;
#ifdef CAMERAHAL_DEBUG
if(mBuffersWithDucati.indexOfKey((uint32_t)pBuffHeader->pBuffer)<0)
{
LOGE("Buffer was never with Ducati!! %p", pBuffHeader->pBuffer);
for(unsigned int i=0;i<mBuffersWithDucati.size();i++) LOGE("0x%x", mBuffersWithDucati.keyAt(i));
}
mBuffersWithDucati.removeItem((int)pBuffHeader->pBuffer);
#endif
if(mDebugFcs)
CAMHAL_LOGEB("C[%d] D[%d] E[%d]", mFramesWithDucati, mFramesWithDisplay, mFramesWithEncoder);
recalculateFPS();
createPreviewMetadata(pBuffHeader, metadataResult, pPortParam->mWidth, pPortParam->mHeight);
if ( NULL != metadataResult.get() ) {
notifyMetadataSubscribers(metadataResult);
metadataResult.clear();
}
{
Mutex::Autolock lock(mFaceDetectionLock);
if ( mFDSwitchAlgoPriority ) {
//Disable region priority and enable face priority for AF
setAlgoPriority(REGION_PRIORITY, FOCUS_ALGO, false);
setAlgoPriority(FACE_PRIORITY, FOCUS_ALGO , true);
//Disable Region priority and enable Face priority
setAlgoPriority(REGION_PRIORITY, EXPOSURE_ALGO, false);
setAlgoPriority(FACE_PRIORITY, EXPOSURE_ALGO, true);
mFDSwitchAlgoPriority = false;
}
}
sniffDccFileDataSave(pBuffHeader);
stat |= advanceZoom();
// On the fly update to 3A settings not working
// Do not update 3A here if we are in the middle of a capture
// or in the middle of transitioning to it
if( mPending3Asettings &&
( (nextState & CAPTURE_ACTIVE) == 0 ) &&
( (state & CAPTURE_ACTIVE) == 0 ) ) {
apply3Asettings(mParameters3A);
}
}
else if( pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_MEASUREMENT )
{
typeOfFrame = CameraFrame::FRAME_DATA_SYNC;
mask = (unsigned int)CameraFrame::FRAME_DATA_SYNC;
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
else if( pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_IMAGE_OUT_IMAGE )
{
OMX_COLOR_FORMATTYPE pixFormat;
const char *valstr = NULL;
pixFormat = pPortParam->mColorFormat;
if ( OMX_COLOR_FormatUnused == pixFormat )
{
typeOfFrame = CameraFrame::IMAGE_FRAME;
mask = (unsigned int) CameraFrame::IMAGE_FRAME;
} else if ( pixFormat == OMX_COLOR_FormatCbYCrY &&
((mPictureFormatFromClient &&
!strcmp(mPictureFormatFromClient,
CameraParameters::PIXEL_FORMAT_JPEG)) ||
!mPictureFormatFromClient) ) {
// signals to callbacks that this needs to be coverted to jpeg
// before returning to framework
typeOfFrame = CameraFrame::IMAGE_FRAME;
mask = (unsigned int) CameraFrame::IMAGE_FRAME;
cameraFrame.mQuirks |= CameraFrame::ENCODE_RAW_YUV422I_TO_JPEG;
cameraFrame.mQuirks |= CameraFrame::FORMAT_YUV422I_UYVY;
// populate exif data and pass to subscribers via quirk
// subscriber is in charge of freeing exif data
ExifElementsTable* exif = new ExifElementsTable();
setupEXIF_libjpeg(exif, mCaptureAncillaryData, mWhiteBalanceData);
cameraFrame.mQuirks |= CameraFrame::HAS_EXIF_DATA;
cameraFrame.mCookie2 = (void*) exif;
} else {
typeOfFrame = CameraFrame::RAW_FRAME;
mask = (unsigned int) CameraFrame::RAW_FRAME;
}
pPortParam->mImageType = typeOfFrame;
if((mCapturedFrames>0) && !mCaptureSignalled)
{
mCaptureSignalled = true;
mCaptureSem.Signal();
}
if( ( CAPTURE_ACTIVE & state ) != CAPTURE_ACTIVE )
{
goto EXIT;
}
{
Mutex::Autolock lock(mBracketingLock);
if ( mBracketingEnabled )
{
doBracketing(pBuffHeader, typeOfFrame);
return eError;
}
}
if (mZoomBracketingEnabled) {
doZoom(mZoomBracketingValues[mCurrentZoomBracketing]);
CAMHAL_LOGDB("Current Zoom Bracketing: %d", mZoomBracketingValues[mCurrentZoomBracketing]);
mCurrentZoomBracketing++;
if (mCurrentZoomBracketing == ARRAY_SIZE(mZoomBracketingValues)) {
mZoomBracketingEnabled = false;
}
}
if ( 1 > mCapturedFrames )
{
goto EXIT;
}
#ifdef OMAP_ENHANCEMENT_CPCAM
setMetaData(cameraFrame.mMetaData, pBuffHeader->pPlatformPrivate);
#endif
CAMHAL_LOGDB("Captured Frames: %d", mCapturedFrames);
mCapturedFrames--;
#ifdef CAMERAHAL_USE_RAW_IMAGE_SAVING
if (mYuvCapture) {
struct timeval timeStampUsec;
gettimeofday(&timeStampUsec, NULL);
time_t saveTime;
time(&saveTime);
const struct tm * const timeStamp = gmtime(&saveTime);
char filename[256];
snprintf(filename,256, "%s/yuv_%d_%d_%d_%lu.yuv",
kYuvImagesOutputDirPath,
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec);
const status_t saveBufferStatus = saveBufferToFile(((CameraBuffer*)pBuffHeader->pAppPrivate)->mapped,
pBuffHeader->nFilledLen, filename);
if (saveBufferStatus != OK) {
CAMHAL_LOGE("ERROR: %d, while saving yuv!", saveBufferStatus);
} else {
CAMHAL_LOGD("yuv_%d_%d_%d_%lu.yuv successfully saved in %s",
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec,
kYuvImagesOutputDirPath);
}
}
#endif
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
else if (pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_VIDEO) {
typeOfFrame = CameraFrame::RAW_FRAME;
pPortParam->mImageType = typeOfFrame;
{
Mutex::Autolock lock(mLock);
if( ( CAPTURE_ACTIVE & state ) != CAPTURE_ACTIVE ) {
goto EXIT;
}
}
CAMHAL_LOGD("RAW buffer done on video port, length = %d", pBuffHeader->nFilledLen);
mask = (unsigned int) CameraFrame::RAW_FRAME;
#ifdef CAMERAHAL_USE_RAW_IMAGE_SAVING
if ( mRawCapture ) {
struct timeval timeStampUsec;
gettimeofday(&timeStampUsec, NULL);
time_t saveTime;
time(&saveTime);
const struct tm * const timeStamp = gmtime(&saveTime);
char filename[256];
snprintf(filename,256, "%s/raw_%d_%d_%d_%lu.raw",
kRawImagesOutputDirPath,
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec);
const status_t saveBufferStatus = saveBufferToFile( ((CameraBuffer*)pBuffHeader->pAppPrivate)->mapped,
pBuffHeader->nFilledLen, filename);
if (saveBufferStatus != OK) {
CAMHAL_LOGE("ERROR: %d , while saving raw!", saveBufferStatus);
} else {
CAMHAL_LOGD("raw_%d_%d_%d_%lu.raw successfully saved in %s",
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec,
kRawImagesOutputDirPath);
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
}
#endif
} else {
CAMHAL_LOGEA("Frame received for non-(preview/capture/measure) port. This is yet to be supported");
goto EXIT;
}
if ( NO_ERROR != stat )
{
CameraBuffer *camera_buffer;
camera_buffer = (CameraBuffer *)pBuffHeader->pAppPrivate;
CAMHAL_LOGDB("sendFrameToSubscribers error: %d", stat);
returnFrame(camera_buffer, typeOfFrame);
}
return eError;
EXIT:
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, stat, eError);
if ( NO_ERROR != stat )
{
if ( NULL != mErrorNotifier )
{
mErrorNotifier->errorNotify(CAMERA_ERROR_UNKNOWN);
}
}
return eError;
}
#endif
/*========================================================*/
/* @ fn SampleTest_FillBufferDone :: Application callback*/
/*========================================================*/
OMX_ERRORTYPE OMXCameraAdapter::OMXCameraAdapterFillBufferDone(OMX_IN OMX_HANDLETYPE hComponent,
OMX_IN OMX_BUFFERHEADERTYPE* pBuffHeader)
{
status_t stat = NO_ERROR;
status_t res1, res2;
OMXCameraPortParameters *pPortParam;
OMX_ERRORTYPE eError = OMX_ErrorNone;
CameraFrame::FrameType typeOfFrame = CameraFrame::ALL_FRAMES;
unsigned int refCount = 0;
BaseCameraAdapter::AdapterState state, nextState;
BaseCameraAdapter::getState(state);
BaseCameraAdapter::getNextState(nextState);
sp<CameraMetadataResult> metadataResult = NULL;
unsigned int mask = 0xFFFF;
CameraFrame cameraFrame;
OMX_OTHER_EXTRADATATYPE *extraData;
OMX_TI_ANCILLARYDATATYPE *ancillaryData = NULL;
bool snapshotFrame = false;
if ( NULL == pBuffHeader ) {
return OMX_ErrorBadParameter;
}
#ifdef CAMERAHAL_OMX_PROFILING
storeProfilingData(pBuffHeader);
#endif
res1 = res2 = NO_ERROR;
if ( !pBuffHeader || !pBuffHeader->pBuffer ) {
CAMHAL_LOGEA("NULL Buffer from OMX");
return OMX_ErrorNone;
}
pPortParam = &(mCameraAdapterParameters.mCameraPortParams[pBuffHeader->nOutputPortIndex]);
// Find buffer and mark it as filled
for (int i = 0; i < pPortParam->mNumBufs; i++) {
if (pPortParam->mBufferHeader[i] == pBuffHeader) {
pPortParam->mStatus[i] = OMXCameraPortParameters::DONE;
}
}
if (pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_PREVIEW)
{
if ( ( PREVIEW_ACTIVE & state ) != PREVIEW_ACTIVE )
{
return OMX_ErrorNone;
}
if ( mWaitingForSnapshot ) {
extraData = getExtradata(pBuffHeader->pPlatformPrivate,
(OMX_EXTRADATATYPE) OMX_AncillaryData);
if ( NULL != extraData ) {
ancillaryData = (OMX_TI_ANCILLARYDATATYPE*) extraData->data;
if ((OMX_2D_Snap == ancillaryData->eCameraView)
|| (OMX_3D_Left_Snap == ancillaryData->eCameraView)
|| (OMX_3D_Right_Snap == ancillaryData->eCameraView)) {
snapshotFrame = OMX_TRUE;
} else {
snapshotFrame = OMX_FALSE;
}
mPending3Asettings |= SetFocus;
}
}
///Prepare the frames to be sent - initialize CameraFrame object and reference count
// TODO(XXX): ancillary data for snapshot frame is not being sent for video snapshot
// if we are waiting for a snapshot and in video mode...go ahead and send
// this frame as a snapshot
if( mWaitingForSnapshot && (mCapturedFrames > 0) &&
(snapshotFrame || (mCapMode == VIDEO_MODE)))
{
typeOfFrame = CameraFrame::SNAPSHOT_FRAME;
mask = (unsigned int)CameraFrame::SNAPSHOT_FRAME;
// video snapshot gets ancillary data and wb info from last snapshot frame
mCaptureAncillaryData = ancillaryData;
mWhiteBalanceData = NULL;
extraData = getExtradata(pBuffHeader->pPlatformPrivate,
(OMX_EXTRADATATYPE) OMX_WhiteBalance);
if ( NULL != extraData )
{
mWhiteBalanceData = (OMX_TI_WHITEBALANCERESULTTYPE*) extraData->data;
}
}
else
{
typeOfFrame = CameraFrame::PREVIEW_FRAME_SYNC;
mask = (unsigned int)CameraFrame::PREVIEW_FRAME_SYNC;
}
if (mRecording)
{
mask |= (unsigned int)CameraFrame::VIDEO_FRAME_SYNC;
mFramesWithEncoder++;
}
//LOGV("FBD pBuffer = 0x%x", pBuffHeader->pBuffer);
if( mWaitingForSnapshot )
{
if (!mBracketingEnabled &&
((HIGH_SPEED == mCapMode) || (VIDEO_MODE == mCapMode)) )
{
notifyShutterSubscribers();
}
}
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
mFramesWithDisplay++;
mFramesWithDucati--;
#ifdef CAMERAHAL_DEBUG
if(mBuffersWithDucati.indexOfKey((uint32_t)pBuffHeader->pBuffer)<0)
{
LOGE("Buffer was never with Ducati!! %p", pBuffHeader->pBuffer);
for(unsigned int i=0;i<mBuffersWithDucati.size();i++) LOGE("0x%x", mBuffersWithDucati.keyAt(i));
}
mBuffersWithDucati.removeItem((int)pBuffHeader->pBuffer);
#endif
if(mDebugFcs)
CAMHAL_LOGEB("C[%d] D[%d] E[%d]", mFramesWithDucati, mFramesWithDisplay, mFramesWithEncoder);
recalculateFPS();
createPreviewMetadata(pBuffHeader, metadataResult, pPortParam->mWidth, pPortParam->mHeight);
if ( NULL != metadataResult.get() ) {
notifyMetadataSubscribers(metadataResult);
metadataResult.clear();
}
{
Mutex::Autolock lock(mFaceDetectionLock);
if ( mFDSwitchAlgoPriority ) {
//Disable region priority and enable face priority for AF
setAlgoPriority(REGION_PRIORITY, FOCUS_ALGO, false);
setAlgoPriority(FACE_PRIORITY, FOCUS_ALGO , true);
//Disable Region priority and enable Face priority
setAlgoPriority(REGION_PRIORITY, EXPOSURE_ALGO, false);
setAlgoPriority(FACE_PRIORITY, EXPOSURE_ALGO, true);
mFDSwitchAlgoPriority = false;
}
}
sniffDccFileDataSave(pBuffHeader);
stat |= advanceZoom();
// On the fly update to 3A settings not working
// Do not update 3A here if we are in the middle of a capture
// or in the middle of transitioning to it
if( mPending3Asettings &&
( (nextState & CAPTURE_ACTIVE) == 0 ) &&
( (state & CAPTURE_ACTIVE) == 0 ) ) {
apply3Asettings(mParameters3A);
}
}
else if( pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_MEASUREMENT )
{
typeOfFrame = CameraFrame::FRAME_DATA_SYNC;
mask = (unsigned int)CameraFrame::FRAME_DATA_SYNC;
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
else if( pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_IMAGE_OUT_IMAGE )
{
OMX_COLOR_FORMATTYPE pixFormat;
const char *valstr = NULL;
pixFormat = pPortParam->mColorFormat;
if ( OMX_COLOR_FormatUnused == pixFormat )
{
typeOfFrame = CameraFrame::IMAGE_FRAME;
mask = (unsigned int) CameraFrame::IMAGE_FRAME;
} else if ( pixFormat == OMX_COLOR_FormatCbYCrY &&
((mPictureFormatFromClient &&
!strcmp(mPictureFormatFromClient,
CameraParameters::PIXEL_FORMAT_JPEG)) ||
!mPictureFormatFromClient) ) {
// signals to callbacks that this needs to be coverted to jpeg
// before returning to framework
typeOfFrame = CameraFrame::IMAGE_FRAME;
mask = (unsigned int) CameraFrame::IMAGE_FRAME;
cameraFrame.mQuirks |= CameraFrame::ENCODE_RAW_YUV422I_TO_JPEG;
cameraFrame.mQuirks |= CameraFrame::FORMAT_YUV422I_UYVY;
// populate exif data and pass to subscribers via quirk
// subscriber is in charge of freeing exif data
ExifElementsTable* exif = new ExifElementsTable();
setupEXIF_libjpeg(exif, mCaptureAncillaryData, mWhiteBalanceData);
cameraFrame.mQuirks |= CameraFrame::HAS_EXIF_DATA;
cameraFrame.mCookie2 = (void*) exif;
} else {
typeOfFrame = CameraFrame::RAW_FRAME;
mask = (unsigned int) CameraFrame::RAW_FRAME;
}
pPortParam->mImageType = typeOfFrame;
if((mCapturedFrames>0) && !mCaptureSignalled)
{
mCaptureSignalled = true;
mCaptureSem.Signal();
}
if( ( CAPTURE_ACTIVE & state ) != CAPTURE_ACTIVE )
{
goto EXIT;
}
{
Mutex::Autolock lock(mBracketingLock);
if ( mBracketingEnabled )
{
doBracketing(pBuffHeader, typeOfFrame);
return eError;
}
}
if (mZoomBracketingEnabled) {
doZoom(mZoomBracketingValues[mCurrentZoomBracketing]);
CAMHAL_LOGDB("Current Zoom Bracketing: %d", mZoomBracketingValues[mCurrentZoomBracketing]);
mCurrentZoomBracketing++;
if (mCurrentZoomBracketing == ARRAY_SIZE(mZoomBracketingValues)) {
mZoomBracketingEnabled = false;
}
}
if ( 1 > mCapturedFrames )
{
goto EXIT;
}
#ifdef OMAP_ENHANCEMENT_CPCAM
setMetaData(cameraFrame.mMetaData, pBuffHeader->pPlatformPrivate);
#endif
CAMHAL_LOGDB("Captured Frames: %d", mCapturedFrames);
mCapturedFrames--;
#ifdef CAMERAHAL_USE_RAW_IMAGE_SAVING
if (mYuvCapture) {
struct timeval timeStampUsec;
gettimeofday(&timeStampUsec, NULL);
time_t saveTime;
time(&saveTime);
const struct tm * const timeStamp = gmtime(&saveTime);
char filename[256];
snprintf(filename,256, "%s/yuv_%d_%d_%d_%lu.yuv",
kYuvImagesOutputDirPath,
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec);
const status_t saveBufferStatus = saveBufferToFile(((CameraBuffer*)pBuffHeader->pAppPrivate)->mapped,
pBuffHeader->nFilledLen, filename);
if (saveBufferStatus != OK) {
CAMHAL_LOGE("ERROR: %d, while saving yuv!", saveBufferStatus);
} else {
CAMHAL_LOGD("yuv_%d_%d_%d_%lu.yuv successfully saved in %s",
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec,
kYuvImagesOutputDirPath);
}
}
#endif
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
else if (pBuffHeader->nOutputPortIndex == OMX_CAMERA_PORT_VIDEO_OUT_VIDEO) {
typeOfFrame = CameraFrame::RAW_FRAME;
pPortParam->mImageType = typeOfFrame;
{
Mutex::Autolock lock(mLock);
if( ( CAPTURE_ACTIVE & state ) != CAPTURE_ACTIVE ) {
goto EXIT;
}
}
CAMHAL_LOGD("RAW buffer done on video port, length = %d", pBuffHeader->nFilledLen);
mask = (unsigned int) CameraFrame::RAW_FRAME;
#ifdef CAMERAHAL_USE_RAW_IMAGE_SAVING
if ( mRawCapture ) {
struct timeval timeStampUsec;
gettimeofday(&timeStampUsec, NULL);
time_t saveTime;
time(&saveTime);
const struct tm * const timeStamp = gmtime(&saveTime);
char filename[256];
snprintf(filename,256, "%s/raw_%d_%d_%d_%lu.raw",
kRawImagesOutputDirPath,
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec);
const status_t saveBufferStatus = saveBufferToFile( ((CameraBuffer*)pBuffHeader->pAppPrivate)->mapped,
pBuffHeader->nFilledLen, filename);
if (saveBufferStatus != OK) {
CAMHAL_LOGE("ERROR: %d , while saving raw!", saveBufferStatus);
} else {
CAMHAL_LOGD("raw_%d_%d_%d_%lu.raw successfully saved in %s",
timeStamp->tm_hour,
timeStamp->tm_min,
timeStamp->tm_sec,
timeStampUsec.tv_usec,
kRawImagesOutputDirPath);
stat = sendCallBacks(cameraFrame, pBuffHeader, mask, pPortParam);
}
}
#endif
} else {
CAMHAL_LOGEA("Frame received for non-(preview/capture/measure) port. This is yet to be supported");
goto EXIT;
}
if ( NO_ERROR != stat )
{
CameraBuffer *camera_buffer;
camera_buffer = (CameraBuffer *)pBuffHeader->pAppPrivate;
CAMHAL_LOGDB("sendFrameToSubscribers error: %d", stat);
returnFrame(camera_buffer, typeOfFrame);
}
return eError;
EXIT:
CAMHAL_LOGEB("Exiting function %s because of ret %d eError=%x", __FUNCTION__, stat, eError);
if ( NO_ERROR != stat )
{
if ( NULL != mErrorNotifier )
{
mErrorNotifier->errorNotify(CAMERA_ERROR_UNKNOWN);
}
}
return eError;
}
暫且先到這裡
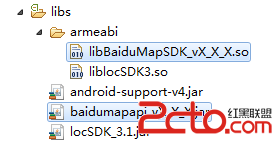 Android之旅十八 百度地圖環境搭建
Android之旅十八 百度地圖環境搭建
在android中使用百度地圖,我們可以先看看百度地圖相應的SDK信息:http://developer.baidu.com/map/index.php?title=an
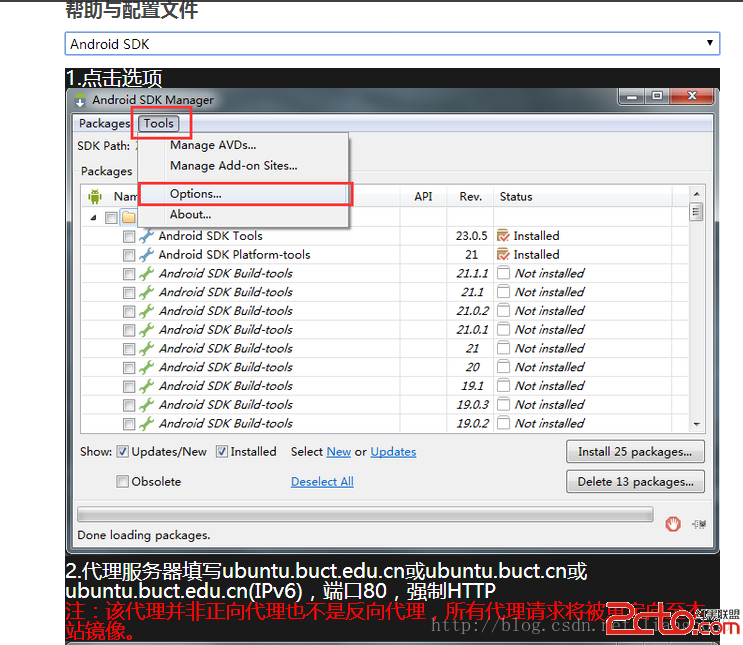 解決國內android sdk無法更新,google不能的簡單辦法
解決國內android sdk無法更新,google不能的簡單辦法
在國內屏蔽了許多外國網站,連google 和android都屏蔽了,做程序員的就苦了!不過車到山前必有路,我們也有我們的辦法!首先要先進去google等的一系列網站,那麼
 Android高仿微信聊天界面代碼分享
Android高仿微信聊天界面代碼分享
微信聊天現在非常火,是因其界面漂亮嗎,哈哈,也許吧。微信每條消息都帶有一個氣泡,非常迷人,看起來感覺實現起來非常難,其實並不難。下面小編給大家分享實現代碼。先給大家展示下
 Android學會屬性動畫的基本用法(下),Interpolator 與ViewPropertyAnimator的用法
Android學會屬性動畫的基本用法(下),Interpolator 與ViewPropertyAnimator的用法
Interpolator的用法Interpolator這個東西很難進行翻譯,直譯過來的話是補間器的意思,它的主要作用是可以控制動畫的變化速率,比如去實現一種非線性運動的動




