本文希望通過對androidsensor系統的介紹,使大家在了解android sensor系統架構的同時,會對大家閱讀和分析其他同類型代碼框架有所幫助。
1:概覽
首先看下應用層如何獲取sensor數據
public class SensorActivity extends Activity, implements SensorEventListener {
private final SensorManager mSensorManager;
private final Sensor mAccelerometer;
public SensorActivity() {
//獲取對應服務
mSensorManager = (SensorManager)getSystemService(SENSOR_SERVICE);
//獲取指定sensor對象
mAccelerometer = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
}
protected void onResume() {
super.onResume();
//注冊listener用於數據回調
mSensorManager.registerListener(this, mAccelerometer, SensorManager.SENSOR_DELAY_NORMAL);
}
protected void onPause() {
super.onPause();
mSensorManager.unregisterListener(this);
}
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
public void onSensorChanged(SensorEvent event) {
}
}
從代碼上看,應用首先要使用sensor service名來獲取SensorManager對象實例,然後調用其成員函數registerListener並傳入listener來得到回調數據。
Sensor service在後台和driver交互獲取數據,各個應用連上service獲取想要的sensor數據,從如上代碼看,沒有任何和service交互的代碼,這一切都被封裝到SensorManager裡了。
2:Sensor service
Android輕量級的系統服務,一般都會運行於systemserver內,sensor service夠輕量,當然不能例外。
System server起來時,會創建sensorserivice:
//frameworks/base/cmds/system_server/library/system_init.cpp
extern "C" status_t system_init()
{
LOGI("Entered system_init()");
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
LOGI("ServiceManager: %p\n", sm.get());
sp<GrimReaper> grim = new GrimReaper();
sm->asBinder()->linkToDeath(grim, grim.get(), 0);
char propBuf[PROPERTY_VALUE_MAX];
property_get("system_init.startsurfaceflinger", propBuf, "1");
if (strcmp(propBuf, "1") == 0) {
// Start the SurfaceFlinger
SurfaceFlinger::instantiate();
}
// Start the sensor service
SensorService::instantiate();
…..
}
通過調用SensorService的靜態成員函數instantiate()來初始化並創建sensor service,在詳細介紹這個函數的內部行為之前,先來看下SensorService類的聲明。
//frameworks/base/services/sensorservice/Sensorservice.h
class SensorService :
public BinderService<SensorService>,
public BnSensorServer,
protected Thread
{
friend class BinderService<SensorService>;
static const nsecs_t MINIMUM_EVENTS_PERIOD = 1000000; // 1000 Hz
SensorService();
virtual ~SensorService();
virtual void onFirstRef();
// Thread interface
virtual bool threadLoop();
// ISensorServer interface
virtual Vector<Sensor> getSensorList();
virtual sp<ISensorEventConnection> createSensorEventConnection();
virtual status_t dump(int fd, const Vector<String16>& args);
class SensorEventConnection : public BnSensorEventConnection {
virtual ~SensorEventConnection();
virtual void onFirstRef();
virtual sp<SensorChannel> getSensorChannel() const;
virtual status_t enableDisable(int handle, bool enabled);
virtual status_t setEventRate(int handle, nsecs_t ns);
sp<SensorService> const mService;
sp<SensorChannel> const mChannel;
mutable Mutex mConnectionLock;
// protected by SensorService::mLock
SortedVector<int> mSensorInfo;
public:
SensorEventConnection(const sp<SensorService>& service);
status_t sendEvents(sensors_event_t const* buffer, size_t count,
sensors_event_t* scratch = NULL);
bool hasSensor(int32_t handle) const;
bool hasAnySensor() const;
bool addSensor(int32_t handle);
bool removeSensor(int32_t handle);
};
class SensorRecord {
SortedVector< wp<SensorEventConnection> > mConnections;
public:
SensorRecord(const sp<SensorEventConnection>& connection);
bool addConnection(const sp<SensorEventConnection>& connection);
bool removeConnection(const wp<SensorEventConnection>& connection);
size_t getNumConnections() const { return mConnections.size(); }
};
SortedVector< wp<SensorEventConnection> > getActiveConnections() const;
DefaultKeyedVector<int, SensorInterface*> getActiveVirtualSensors() const;
String8 getSensorName(int handle) const;
void recordLastValue(sensors_event_t const * buffer, size_t count);
static void sortEventBuffer(sensors_event_t* buffer, size_t count);
void registerSensor(SensorInterface* sensor);
void registerVirtualSensor(SensorInterface* sensor);
// constants
Vector<Sensor> mSensorList;
DefaultKeyedVector<int, SensorInterface*> mSensorMap;
Vector<SensorInterface *> mVirtualSensorList;
Permission mDump;
status_t mInitCheck;
// protected by mLock
mutable Mutex mLock;
DefaultKeyedVector<int, SensorRecord*> mActiveSensors;
DefaultKeyedVector<int, SensorInterface*> mActiveVirtualSensors;
SortedVector< wp<SensorEventConnection> > mActiveConnections;
// The size of this vector is constant, only the items are mutable
KeyedVector<int32_t, sensors_event_t> mLastEventSeen;
public:
static char const* getServiceName() { return "sensorservice"; }
void cleanupConnection(SensorEventConnection* connection);
status_t enable(const sp<SensorEventConnection>& connection, int handle);
status_t disable(const sp<SensorEventConnection>& connection, int handle);
status_t setEventRate(const sp<SensorEventConnection>& connection, int handle, nsecs_t ns);
};
這個類裡面聲明了很多函數和變量,我們如何區分哪些是框架性接口函數,哪些是功能輔助性的呢?很簡單,看父類就知道了。
class SensorService :
public BinderService<SensorService>,
public BnSensorServer,
protected Thread
SensorService多重繼承自如上三個類,下面簡單介紹下:
BinderService<SensorService>:
模板類,主要功能是提供一些靜態函數創建service對象實例,並加到service manager,主要函數有instantiate()等。
Thread:
線程輔助類,調用run創建並啟動線程,然後在線程主函數內會回調threadloop函數,所以我們在使用這個它時,最簡單得做法是派生自它,然後重寫threadloop即可。
BnSensorServer:
這個類派生自ISensorServer,ISensorServer則聲明了sensor server和client之間RPC通信接口,具體如下:
class ISensorServer : public IInterface
{
public:
DECLARE_META_INTERFACE(SensorServer);
virtual Vector<Sensor> getSensorList() = 0;
virtual sp<ISensorEventConnection> createSensorEventConnection() = 0;
};
了解了三個父類的功能後,可以推出SensorService的核心功能如下:
1:SensorService:: instantiate()初始化sensorservice並創建線程
2:threadloop在線程啟動後,從驅動獲取sensor原始數據並通過RPC機制讓sensor client獲取。
3:BnSensorServer的成員函數負責讓sensor client獲取sensor信息和創建connection
接下去我們就從這幾個函數著手進行詳細分析!
先看SensorService:: instantiate():
//frameworks/base/include/binder/BinderService.h
template<typename SERVICE>
class BinderService
{
public:
static status_t publish() {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(String16(SERVICE::getServiceName()), new SERVICE());
}
static void publishAndJoinThreadPool() {
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm(defaultServiceManager());
sm->addService(String16(SERVICE::getServiceName()), new SERVICE());
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
static void instantiate() { publish(); }
static status_t shutdown() {
return NO_ERROR;
}
BinderService是模板類,通過代碼可以看到,instantiate直接調用了publish函數,publish函數先獲取service manager,然後new了一個SensorService對象,接著調用addService並將sensor service name和新創建sensorservice對象傳入。
可能有人會問,調用addService的目的是什麼?我們不是通過newSensorService創建sensor後台服務了嗎?是的,服務的確已經啟動了,但是服務的目的是什麼?是供他人使用,你要讓他人使用你,前提是得讓別人找到你,所以我覺得addService的主要功能有兩點:
1:將sensor service信息傳入binderkernel,然後binder kernel生成對應於sensor service的handle,並維護之。
2:service manager得到並維護對應servicename和handle供其他應用獲取。
舉例來說,這就好比你建立了一台設備,你要讓別人連接你這台設備,你需要讓你的設備與寬帶服務器建立撥號連接,然後寬帶服務器給你分配ip,別人拿到ip,就能與你建立通信鏈接了,但是ip太難記了,所以就有了域名
把例子中描述的和android機制對應下,設備對應sensor service,binder kernel對應寬帶服務器,ip對應handle,service name對應域名,那service manager對應什麼?當然是域名解析服務了。
所以現在就很明了了,客戶端要與對應的服務建立通信,只需要通過服務名拿到對應的handle,然後用這個handle組建對應的proxy binder對象即可。
那從代碼中呢,如何區分代碼是用於創建本地服務還是創建遠程代理呢?很簡單,看類命名就可以了,以Sensor service舉例,本地服務類為BnSensorServer,代理類則為BpSensorServer,開到類的開頭沒,Bn以為native binder,Bp則是proxy binder。
Android RPC通信那塊就簡單介紹到這裡,繼續往下看。
服務創建時,new了一個SensorService對象實例,那接下去代碼肯定走SensorService的構造函數:
//frameworks/base/services/sensorservice/SensorService.cpp
SensorService::SensorService()
: Thread(false),
mDump("android.permission.DUMP"),
mInitCheck(NO_INIT){
}
看到了,構造函數相當於啥也沒做,既然sensorservice對象傳給了ServiceManager::AddService,我們來看看AddService的函數聲明
virtual status_t addService( const String16& name, const sp<IBinder>& service);
第二個參數是sp強引用對象,而非單純的sensor service指針,在第一次構建sp強引用對象時,會調用onFirstRef():
void SensorService::onFirstRef()
{
LOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance());
if (dev.initCheck() == NO_ERROR) {
uint32_t virtualSensorsNeeds =
(1<<SENSOR_TYPE_GRAVITY) |
(1<<SENSOR_TYPE_LINEAR_ACCELERATION) |
(1<<SENSOR_TYPE_ROTATION_VECTOR);
sensor_t const* list;
int count = dev.getSensorList(&list);
mLastEventSeen.setCapacity(count);
for (int i=0 ; i<count ; i++) {
registerSensor( new HardwareSensor(list[i]) );
switch (list[i].type) {
case SENSOR_TYPE_GRAVITY:
case SENSOR_TYPE_LINEAR_ACCELERATION:
case SENSOR_TYPE_ROTATION_VECTOR:
virtualSensorsNeeds &= ~(1<<list[i].type);
break;
}
}
if (virtualSensorsNeeds & (1<<SENSOR_TYPE_GRAVITY)) {
registerVirtualSensor( new GravitySensor(list, count) );
}
if (virtualSensorsNeeds & (1<<SENSOR_TYPE_LINEAR_ACCELERATION)) {
registerVirtualSensor( new LinearAccelerationSensor(list, count) );
}
if (virtualSensorsNeeds & (1<<SENSOR_TYPE_ROTATION_VECTOR)) {
registerVirtualSensor( new RotationVectorSensor(list, count) );
}
run("SensorService", PRIORITY_URGENT_DISPLAY);
mInitCheck = NO_ERROR;
}
}
這個函數先通過SensorDevice:: getInstance獲取SensorDevice對象實例,所以我們接著看SensorDevice的構造函數:
SensorDevice::SensorDevice()
: mSensorDevice(0),
mSensorModule(0)
{
status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID,
(hw_module_t const**)&mSensorModule);
LOGE_IF(err, "couldn't load %s module (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorModule) {
err = sensors_open(&mSensorModule->common, &mSensorDevice);
LOGE_IF(err, "couldn't open device for module %s (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorDevice) {
sensor_t const* list;
ssize_t count = mSensorModule->get_sensors_list(mSensorModule, &list);
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; i<size_t(count) ; i++) {
mActivationCount.add(list[i].handle, model);
//初始將所有sensor設置為未激活狀態
mSensorDevice->activate(mSensorDevice, list[i].handle, 0);
}
}
}
}
通過構造函數可以看出,SensorDevice封裝了對SensorHAL層代碼的調用,主要包含獲取sensor list,poll sensor數據和是否激活指定sensor等,這裡就不詳細描述。
繼續從SensorService::onFirstRef往下走,在得到SensorDevice對象實例後,通過調用dev.getSensorList(&list)獲取sensor list,然後調用registersensor將所有sensor加到SensorService的成員變量mSensorList中。
接下去調用run啟動線程:
run("SensorService", PRIORITY_URGENT_DISPLAY);
線程啟動後,threadloop會被回調
bool SensorService::threadLoop()
{
LOGD("nuSensorService thread starting...");
const size_t numEventMax = 16 * (1 + mVirtualSensorList.size());
sensors_event_t buffer[numEventMax];
sensors_event_t scratch[numEventMax];
SensorDevice& device(SensorDevice::getInstance());
const size_t vcount = mVirtualSensorList.size();
ssize_t count;
do {
//從設備獲取已經激活sensor的數據,如果無一sensor被激活,該動作將會被
//阻塞
count = device.poll(buffer, numEventMax);
if (count<0) {
LOGE("sensor poll failed (%s)", strerror(-count));
break;
}
//獲取最新的數據
recordLastValue(buffer, count);
// handle virtual sensors
if (count && vcount) {
const DefaultKeyedVector<int, SensorInterface*> virtualSensors(
getActiveVirtualSensors());
const size_t activeVirtualSensorCount = virtualSensors.size();
if (activeVirtualSensorCount) {
size_t k = 0;
for (size_t i=0 ; i<size_t(count) ; i++) {
sensors_event_t const * const event = buffer;
for (size_t j=0 ; j<activeVirtualSensorCount ; j++) {
sensors_event_t out;
if (virtualSensors.valueAt(j)->process(&out, event[i])) {
buffer[count + k] = out;
k++;
}
}
}
if (k) {
// record the last synthesized values
recordLastValue(&buffer[count], k);
count += k;
// sort the buffer by time-stamps
sortEventBuffer(buffer, count);
}
}
}
// 得到已有的client連接
const SortedVector< wp<SensorEventConnection> > activeConnections(
getActiveConnections());
size_t numConnections = activeConnections.size();
for (size_t i=0 ; i<numConnections ; i++) {
sp<SensorEventConnection> connection(
activeConnections[i].promote());
if (connection != 0) {
//將sensor數據發往client端
connection->sendEvents(buffer, count, scratch);
}
}
} while (count >= 0 || Thread::exitPending());
LOGW("Exiting SensorService::threadLoop!");
return false;
}
Threadloop主要通過調用sensor HAL函數獲取已激活sensor的數據,然後將獲取到的數據發往已經建立的connection。
Connection是如何建立的?我們之前描述的三個父類的功能中已經有過描述,ISensorServer定義了client和sensor service的RPC通信接口,client端在得到sensor service代理對象後,通過調用createSensorEventConnection與sensorservice建立connection,先看service端的實現代碼:
sp<ISensorEventConnection> SensorService::createSensorEventConnection()
{
sp<SensorEventConnection> result(new SensorEventConnection(this));
return result;
}
Service端僅僅創建了SensorEventConnection對象實例,然後將這個對象實例傳給client端,這裡有兩個疑問:
1:將實例對象傳給client,那是否SensorEventConnection實例也是個RPC服務?
2:sensor service不是保存了active connections,這裡也沒做保存操作,那在哪裡保存?唯一的線索就是構造SensorEventConnection傳入的this指針了。
先看第一個疑問,SensorEventConnection是不是RPC服務,看其構造函數先
class SensorEventConnection : public BnSensorEventConnection
看到沒?父類是Bn開頭的,說明其是native binder,的確是RPC服務,由於這個服務是私底下咱哥倆偷摸用的,所以就無需加入servicemanager了。
那這個connection是怎麼加入sensorservice的action connections的,由於是RPC服務,所以這塊動作應該是由client驅動的。
先看ISensorEventConnection
class ISensorEventConnection : public IInterface
{
public:
DECLARE_META_INTERFACE(SensorEventConnection);
virtual sp<SensorChannel> getSensorChannel() const = 0;
virtual status_t enableDisable(int handle, bool enabled) = 0;
virtual status_t setEventRate(int handle, nsecs_t ns) = 0;
};
共三個接口函數,setEventRate這個應該是設置sensor 數據上報頻率的,跟active connection應該沒啥關系;getSensorChannel是干嘛用的?等會介紹,但是看名字,也不像!剩下就是enableDisable這個函數了
status_t SensorService::SensorEventConnection::enableDisable(
int handle, bool enabled)
{
status_t err;
if (enabled) {
err = mService->enable(this, handle);
} else {
err = mService->disable(this, handle);
}
return err;
}
如果是enable,調用sensor service的enable函數
status_t SensorService::enable(const sp<SensorEventConnection>& connection,
int handle)
{
if (mInitCheck != NO_ERROR)
return mInitCheck;
Mutex::Autolock _l(mLock);
SensorInterface* sensor = mSensorMap.valueFor(handle);
//將對應sensor激活
status_t err = sensor ? sensor->activate(connection.get(), true) : status_t(BAD_VALUE);
if (err == NO_ERROR) {
SensorRecord* rec = mActiveSensors.valueFor(handle);
if (rec == 0) {
rec = new SensorRecord(connection);
mActiveSensors.add(handle, rec);
if (sensor->isVirtual()) {
mActiveVirtualSensors.add(handle, sensor);
}
} else {
if (rec->addConnection(connection)) {
// this sensor is already activated, but we are adding a
// connection that uses it. Immediately send down the last
// known value of the requested sensor.
sensors_event_t scratch;
sensors_event_t& event(mLastEventSeen.editValueFor(handle));
if (event.version == sizeof(sensors_event_t)) {
connection->sendEvents(&event, 1);
}
}
}
if (err == NO_ERROR) {
// connection now active
//將connection加入active connection中
if (connection->addSensor(handle)) {
// the sensor was added (which means it wasn't already there)
// so, see if this connection becomes active
if (mActiveConnections.indexOf(connection) < 0) {
mActiveConnections.add(connection);
}
}
}
}
return err;
}
在這個函數中,激活對應sensor,然後將當前connection加入active connection
到這裡,知道了如何創建connection和activeconnection後,還有一個問題就是,sensor數據發送的?大家可能會說,不是通過調用SensorEventConnection ::sendEvents來實現的嗎?但是回過頭看下ISensorEventConnection的三個函數聲明,沒有sendEvents這個函數,也就說sendEvents只是一個供sensorservice端用的public函數而已。
status_t SensorService::SensorEventConnection::sendEvents(
sensors_event_t const* buffer, size_t numEvents,
sensors_event_t* scratch)
{
//。。。。
ssize_t size = mChannel->write(scratch, count*sizeof(sensors_event_t));
if (size == -EAGAIN) {
// the destination doesn't accept events anymore, it's probably
// full. For now, we just drop the events on the floor.
LOGW("dropping %d events on the floor", count);
return size;
}
LOGE_IF(size<0, "dropping %d events on the floor (%s)",
count, strerror(-size));
return size < 0 ? status_t(size) : status_t(NO_ERROR);
}
SensorEvent調用SensorChannel的wirte函數發送sensor數據,mChannel是在SensorEventConnection函數中初始化的。
ssize_t SensorChannel::write(void const* vaddr, size_t size)
{
ssize_t len = ::write(mSendFd, vaddr, size);
if (len < 0)
return -errno;
return len;
}
從這個函數中看到,sensorservice和client端的sensor數據不是通過RPC機制傳遞的,看下SensorChannel的構造函數
SensorChannel::SensorChannel()
: mSendFd(-1), mReceiveFd(-1)
{
int fds[2];
if (pipe(fds) == 0) {
mReceiveFd = fds[0];
mSendFd = fds[1];
fcntl(mReceiveFd, F_SETFL, O_NONBLOCK);
fcntl(mSendFd, F_SETFL, O_NONBLOCK);
}
}
明白了,進程間數據共享是通過管道來實現的,現在知道ISensorEventConnection:: getSensorChannel的作用了,用於傳遞Receive FD給client的 www.2cto.com
status_t SensorChannel::writeToParcel(Parcel* reply) const
{
if (mReceiveFd < 0)
return -EINVAL;
status_t result = reply->writeDupFileDescriptor(mReceiveFd);
close(mReceiveFd);
mReceiveFd = -1;
return result;
}
Client端拿到received FD後,就可以讀取sensor數據啦。至此,服務端已經說完了,接下去是客戶端部分的講解。
 Android中的縮略圖加載-不浪費一點多余的內存
Android中的縮略圖加載-不浪費一點多余的內存
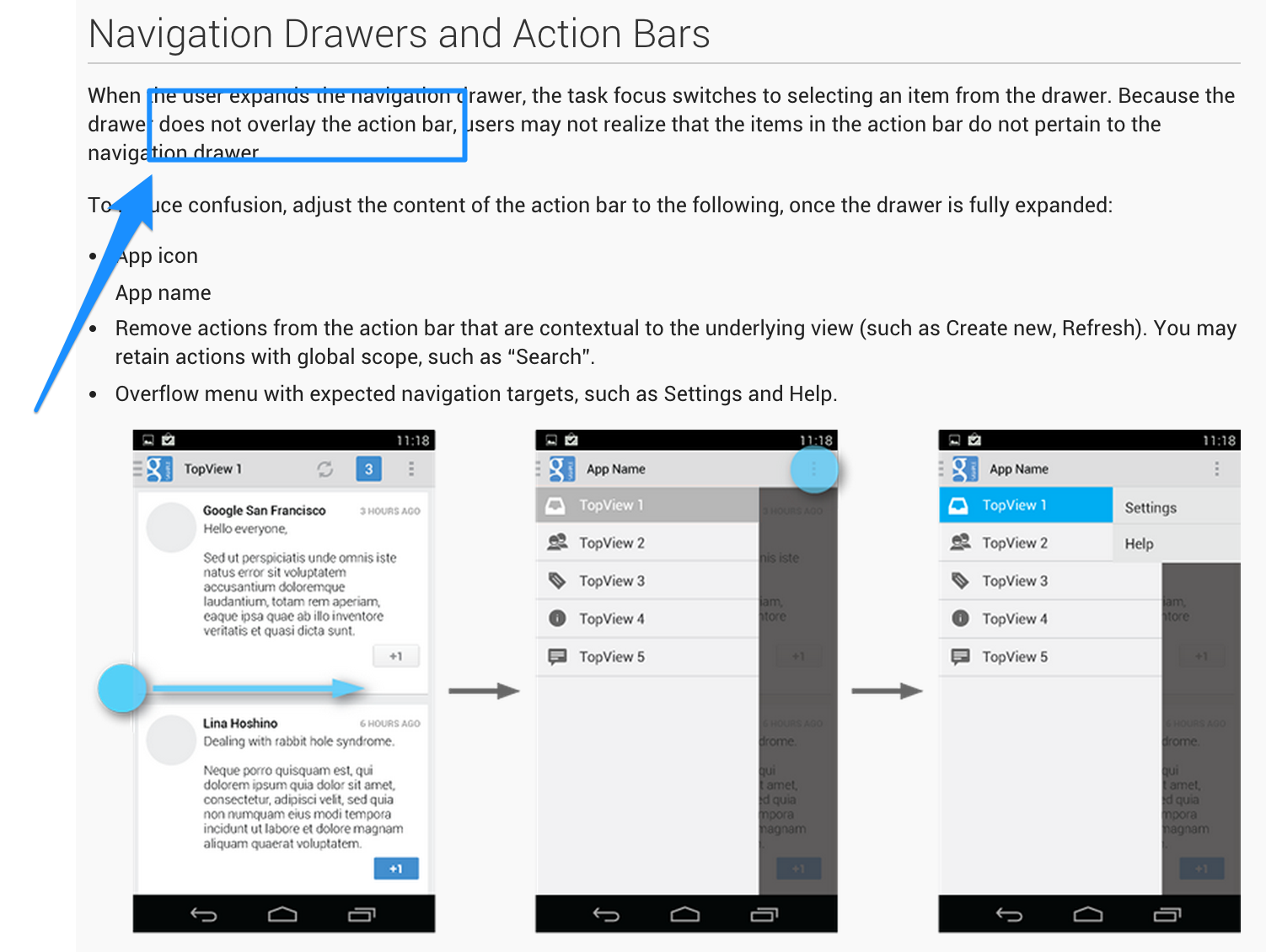 Android 滑動導航菜單的快速構建(二) Material Design
Android 滑動導航菜單的快速構建(二) Material Design
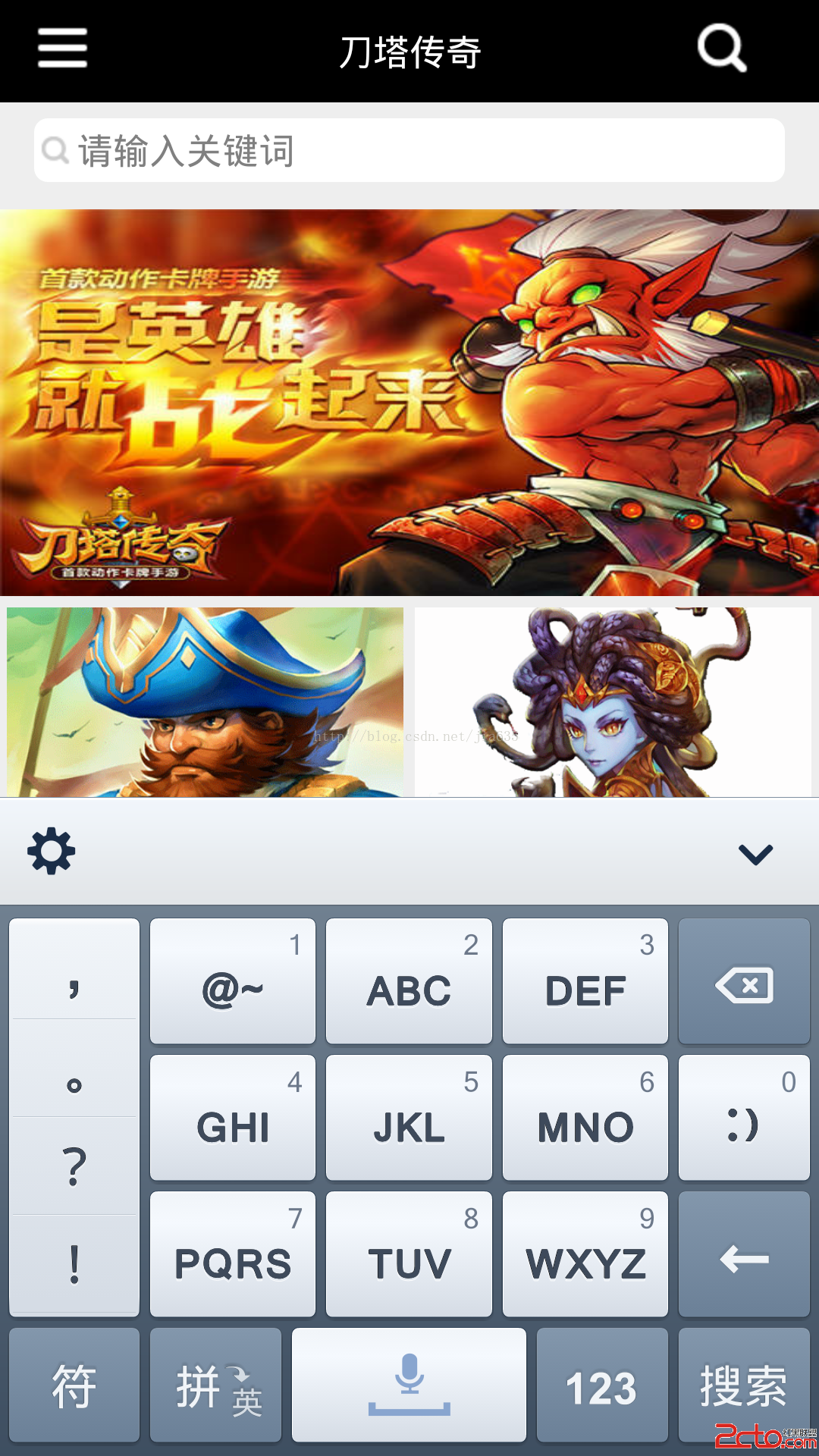 android設置軟鍵盤搜索鍵以及監聽搜索鍵點擊時發生兩次事件的問題解決
android設置軟鍵盤搜索鍵以及監聽搜索鍵點擊時發生兩次事件的問題解決
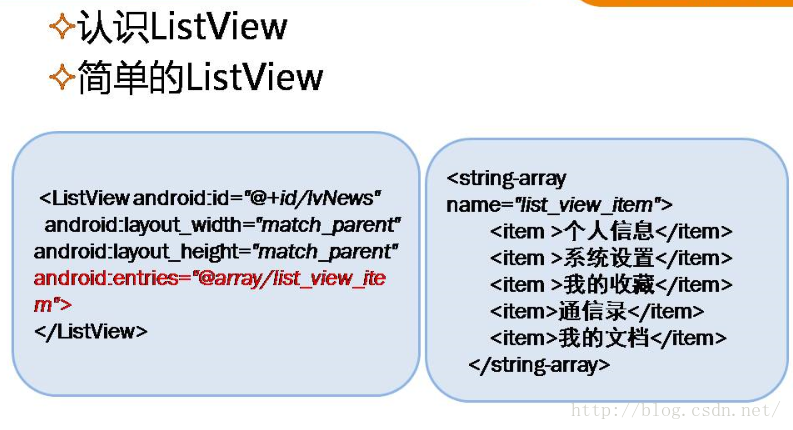 Android——ListView與適配器
Android——ListView與適配器




