編輯:關於Android編程
由於最近研究Android 模擬器的GPS模塊的實現,發現了模擬器GPS的bug。
啟動模擬器,通過DDMS發送經緯度,通過應用可以抓到數據,進入設置,安全與位置,關閉GPS,再打開,再次打開GPS測試軟件,再次發送經緯度,怎麼也收不到。
查看了代碼發現Android模擬器中完成GPS模塊的功能主要是一個HAL層代碼,通過socket接收發送過來的經緯度信息,其中代碼是有問題的,GPS模塊的工作主要是一個線程,當關閉GPS模塊的時候這個線程結束了,再次打開的時候不會去啟動這個線程,所以GPS模塊就不工作了,具體看如下代碼:
[cpp]
static void
gps_state_thread( void* arg )
{
GpsState* state = (GpsState*) arg;
NmeaReader reader[1];
int epoll_fd = epoll_create(2);
int started = 0;
int gps_fd = state->fd;
int control_fd = state->control[1];
nmea_reader_init( reader );
// register control file descriptors for polling
epoll_register( epoll_fd, control_fd );
epoll_register( epoll_fd, gps_fd );
D("gps thread running");
// now loop
for (;;) {
struct epoll_event events[2];
int ne, nevents;
nevents = epoll_wait( epoll_fd, events, 2, -1 );
if (nevents < 0) {
if (errno != EINTR)
LOGE("epoll_wait() unexpected error: %s", strerror(errno));
continue;
}
D("gps thread received %d events", nevents);
for (ne = 0; ne < nevents; ne++) {
if ((events[ne].events & (EPOLLERR|EPOLLHUP)) != 0) {
LOGE("EPOLLERR or EPOLLHUP after epoll_wait() !?");
return;
}
if ((events[ne].events & EPOLLIN) != 0) {
int fd = events[ne].data.fd;
if (fd == control_fd)
{
char cmd = 255;
int ret;
D("gps control fd event");
do {
ret = read( fd, &cmd, 1 );
} while (ret < 0 && errno == EINTR);
if (cmd == CMD_QUIT) {
D("gps thread quitting on demand");
return;
}
else if (cmd == CMD_START) {
if (!started) {
D("gps thread starting location_cb=%p", state->callbacks.location_cb);
started = 1;
nmea_reader_set_callback( reader, state->callbacks.location_cb );
}
}
else if (cmd == CMD_STOP) {
if (started) {
D("gps thread stopping");
started = 0;
nmea_reader_set_callback( reader, NULL );
}
}
}
else if (fd == gps_fd)
{
char buff[32];
D("gps fd event");
for (;;) {
int nn, ret;
ret = read( fd, buff, sizeof(buff) );
if (ret < 0) {
if (errno == EINTR)
continue;
if (errno != EWOULDBLOCK)
LOGE("error while reading from gps daemon socket: %s:", strerror(errno));
break;
}
D("received %d bytes: %.*s", ret, ret, buff);
for (nn = 0; nn < ret; nn++)
nmea_reader_addc( reader, buff[nn] );
}
D("gps fd event end");
}
else
{
LOGE("epoll_wait() returned unkown fd %d ?", fd);
}
}
}
}
}
static void
gps_state_thread( void* arg )
{
GpsState* state = (GpsState*) arg;
NmeaReader reader[1];
int epoll_fd = epoll_create(2);
int started = 0;
int gps_fd = state->fd;
int control_fd = state->control[1];
nmea_reader_init( reader );
// register control file descriptors for polling
epoll_register( epoll_fd, control_fd );
epoll_register( epoll_fd, gps_fd );
D("gps thread running");
// now loop
for (;;) {
struct epoll_event events[2];
int ne, nevents;
nevents = epoll_wait( epoll_fd, events, 2, -1 );
if (nevents < 0) {
if (errno != EINTR)
LOGE("epoll_wait() unexpected error: %s", strerror(errno));
continue;
}
D("gps thread received %d events", nevents);
for (ne = 0; ne < nevents; ne++) {
if ((events[ne].events & (EPOLLERR|EPOLLHUP)) != 0) {
LOGE("EPOLLERR or EPOLLHUP after epoll_wait() !?");
return;
}
if ((events[ne].events & EPOLLIN) != 0) {
int fd = events[ne].data.fd;
if (fd == control_fd)
{
char cmd = 255;
int ret;
D("gps control fd event");
do {
ret = read( fd, &cmd, 1 );
} while (ret < 0 && errno == EINTR);
if (cmd == CMD_QUIT) {
D("gps thread quitting on demand");
return;
}
else if (cmd == CMD_START) {
if (!started) {
D("gps thread starting location_cb=%p", state->callbacks.location_cb);
started = 1;
nmea_reader_set_callback( reader, state->callbacks.location_cb );
}
}
else if (cmd == CMD_STOP) {
if (started) {
D("gps thread stopping");
started = 0;
nmea_reader_set_callback( reader, NULL );
}
}
}
else if (fd == gps_fd)
{
char buff[32];
D("gps fd event");
for (;;) {
int nn, ret;
ret = read( fd, buff, sizeof(buff) );
if (ret < 0) {
if (errno == EINTR)
continue;
if (errno != EWOULDBLOCK)
LOGE("error while reading from gps daemon socket: %s:", strerror(errno));
break;
}
D("received %d bytes: %.*s", ret, ret, buff);
for (nn = 0; nn < ret; nn++)
nmea_reader_addc( reader, buff[nn] );
}
D("gps fd event end");
}
else
{
LOGE("epoll_wait() returned unkown fd %d ?", fd);
}
}
}
}
}
若要修改的話,就是在setting中開始追代碼喽,在再次開啟GPS模塊的時候再調用init回調函數,再次開啟線程。
以上只是我的拙見。
 Android仿即刻首頁垂直滾動圖,炫酷到底!
Android仿即刻首頁垂直滾動圖,炫酷到底!
項目地址:https://github.com/JeasonWong/JikeGallery話不多說,先上效果。這個效果是在即刻app上看到,覺得很不錯,遂仿之。先說下我
 無需root,教你智能電視和智能機頂盒系統大瘦身清緩存方法
無需root,教你智能電視和智能機頂盒系統大瘦身清緩存方法
現在市面上大部分智能電視和智能機頂盒都是安卓系統。時間久了就會產生大量緩存,對於這些系統緩存如果你視而不見日積月累將會導致你的系統內存越來越少,這樣系統可用
 AndroidMainfest.xml詳解——(activity)
AndroidMainfest.xml詳解——(activity)
語法: . . .包含它的文件:可包含:說明:聲明一個實現應用的部分可視化用戶界面的 Activity(一個 Activity子類)。 所有 Activity
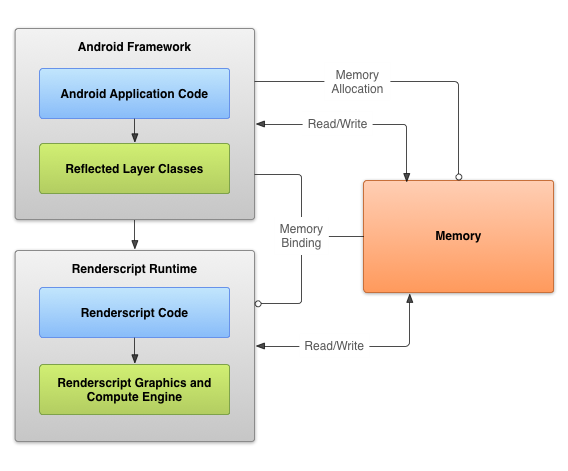 Android高效計算——RenderScript(一)
Android高效計算——RenderScript(一)
高效計算——RenderScriptRenderScript是安卓平台上很受谷歌推薦的一個高效計算平台,它能夠自動把計算任務分配到各個可用的計算核




